Contour error suppression method for digital twin-driven multi-axis numerical control machine tool
A contour error, technology of CNC machine tools, applied in the field of CNC machine tools
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] A digital twin-driven multi-axis CNC machine tool contour error suppression method in this embodiment includes the following steps:
[0035] S1. Establish a virtual model of the digital twin body corresponding to the physical entity, that is, the digital twin body modeling of the multi-axis feed system;
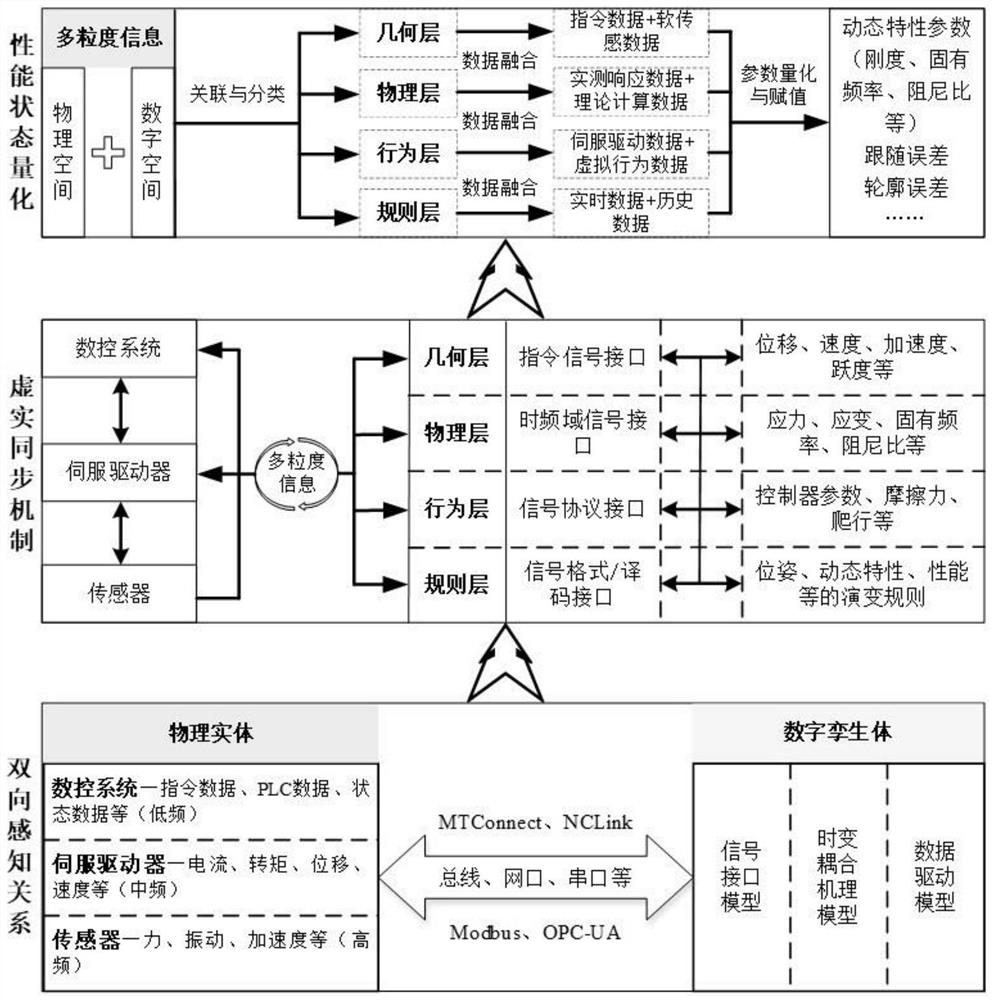
[0036] S2. The virtual-real precise synchronization of the multi-axis feed system, that is, the virtual-real synchronization, establishes a two-way perception relationship between the digital twin and the physical entity through a communication protocol with strong compatibility;
[0037] S3. High-confidence dynamic estimation of contour error, that is, dynamic estimation of contour error, obtaining dynamic characteristic parameters, motion control parameters, nonlinear interference and contour shape parameters. Dynamic characteristic parameters include natural frequency and damping ratio, represented by Dy, motion control Parameters include various controller paramete...
Embodiment 2
[0040] The difference between this embodiment and Embodiment 1 is that in this embodiment, S1-S4 will be specifically supplemented.
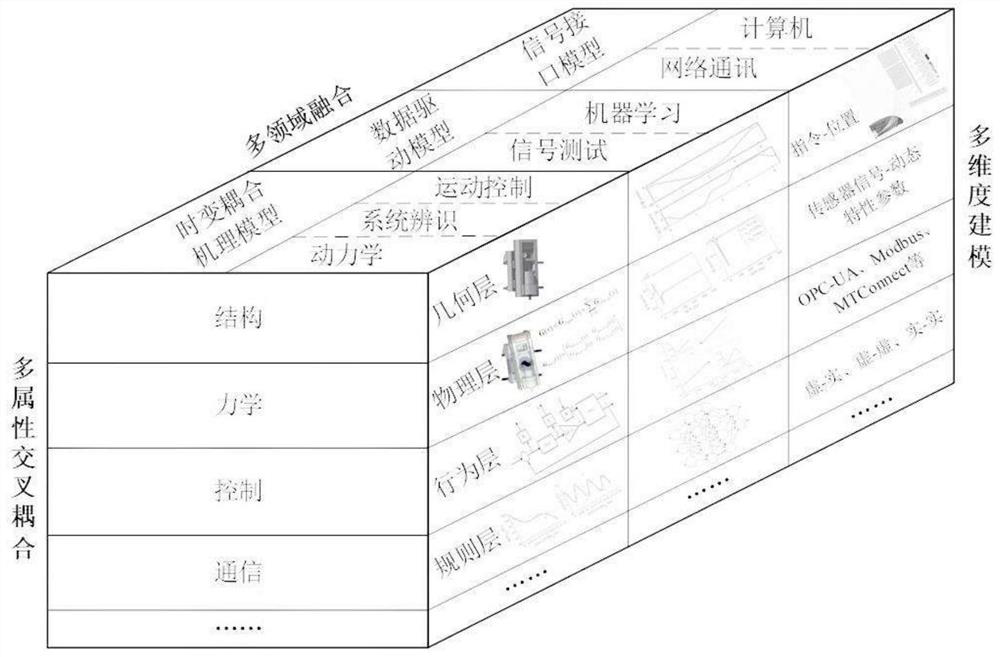
[0041] In the digital twin modeling of the S1 multi-axis feed system, considering that the multi-axis feed system has the characteristics of multi-attribute cross-coupling such as structure, mechanics, control, and communication, the digital twin modeling needs to involve dynamics, system identification, Multi-field modeling technologies such as motion control, signal testing, machine learning, network communication and computer. At the same time, due to the change of pose, velocity, acceleration and the influence of nonlinear interference during the operation of the multi-axis feed system, its dynamic characteristics show obvious time-varying, mismatching and uncertainty between axes, digital twins Volume modeling needs to take into account the dual drivers of mechanism and data. Therefore, in view of the above-mentioned characteristics of the...
Embodiment 3
[0072] Compared with Embodiment 1, the only difference is that in S2, the two-way perception relationship between the digital twin and the physical entity is established, and then the model is reconstructed by constructing the digital twin at a slow time scale, and the period is T. Scan the digital twin and the physical entity. When the digital twin is controlled to change within a cycle, it will be synchronized from virtual to real; when the physical entity is controlled to change within a cycle, it will be synchronized by Real-to-virtual synchronization; when the physical entity is controlled to change uncontrolled within a period, the synchronization from real to virtual is suspended in this period, and the physical entity is scanned repeatedly in this period, and the uncontrolled change is marked. Then, before scanning the digital twin in the next cycle, it is finally synchronized from real to virtual.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More