

Precise agriculture management and analysis system, positioning method, terminal and storage medium
A precision agriculture and analysis system technology, applied in the field of agricultural management analysis, can solve problems such as complexity, high system cost, and difficult segmentation, and achieve the effect of reducing construction costs and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
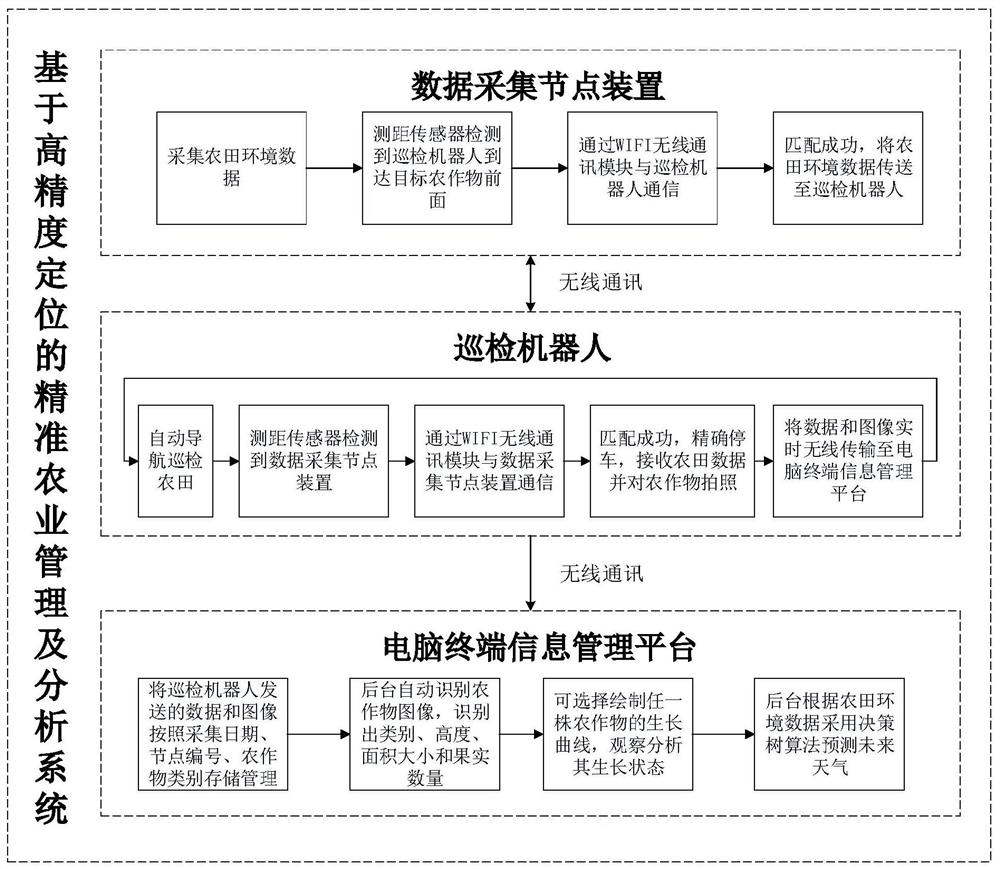
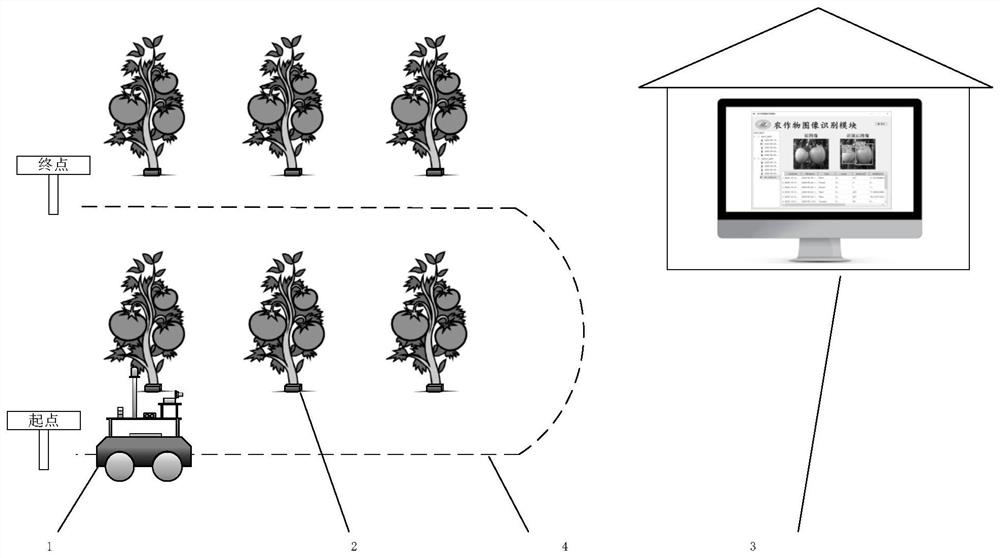
[0073] The working diagram of the precision agricultural management and analysis system based on high-precision positioning is as follows: figure 2 , image 3 shown.
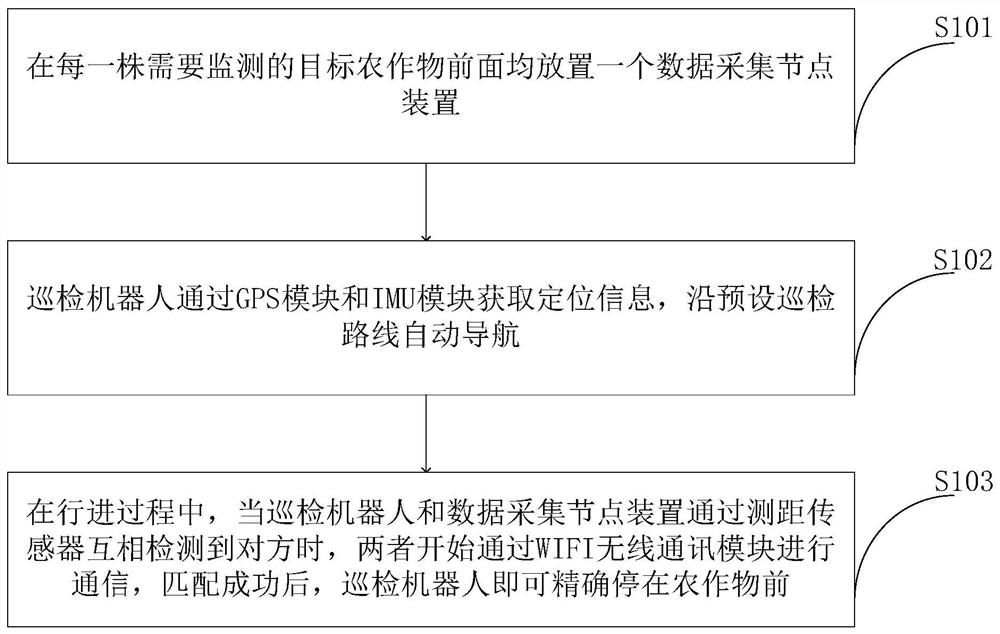
[0074] A data collection node device is placed in front of each crop, and each data collection node device has a unique number. According to the real-time coordinates collected by the GPS module and the real-time orientation obtained by the IMU module, the inspection robot starts automatic navigation along the preset route for inspection.
[0075] When the ranging sensors of the inspection robot and the data acquisition node device detect each other, the two communicate through the WIFI wireless communication module. After the matching is successful, the inspection robot can accurately stop in front of the crops.
[0076] After parking, the inspection robot starts to receive the farmland environmental information sent by the data acquisition node device, including air temperature and humidity, light intensity...
Embodiment 2
[0079] A high-precision positioning method that combines four sensors: GPS module, IMU module, ranging sensor and WIFI wireless communication module. The positioning accuracy is shown in the table below.
[0080] In the walking test of the inspection robot, it is divided into two groups of test groups, one group adopts high-precision GPS module and IMU module for positioning, and the other group integrates GPS module, IMU module, ranging sensor and WIFI wireless communication module for positioning. ;Mark the point that needs to stop with a large label on the ground. When the inspection robot actually stops, measure the deviation distance between the center of the inspection robot and the marked point, and test ten times for each method.
[0081]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More