

Attitude resolving system and method based on extended Kalman filtering
An extended Kalman and calculation technology, which is applied in the attitude calculation system and calculation field based on extended Kalman filtering, can solve the problems of slow attenuation of cut-off frequency, lag of flight control system, low dynamic performance, etc., to improve the calculation Speed, improved solver performance, reduced limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
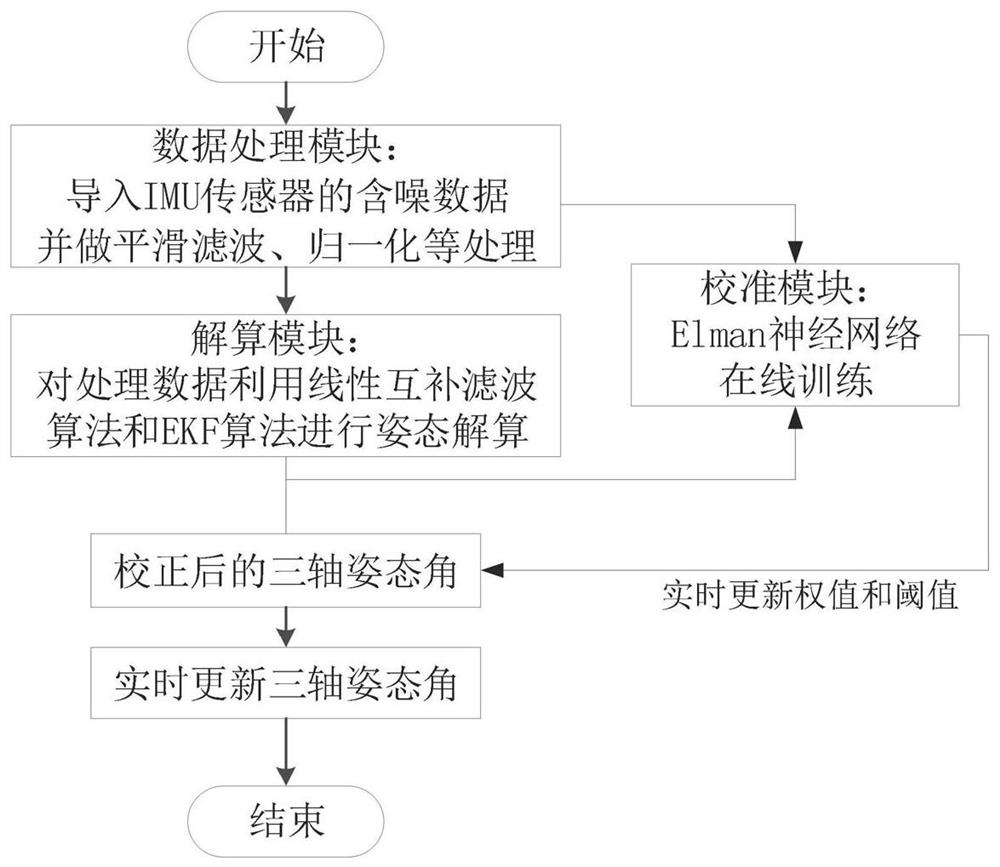
[0053] The fixed-wing UAV is based on the improved extended Kalman filter algorithm and the attitude calculation method assisted by the Elman neural network, including the following steps:
[0054] Step 1, import and process the data, the specific method is:
[0055] Import sensor noise data, including the attitude angular velocity measured by the gyroscope and the attitude angular gravity acceleration measured by the accelerometer. Since the data contains a certain amount of noise, the imported data is then smoothed and normalized for use in step 2;
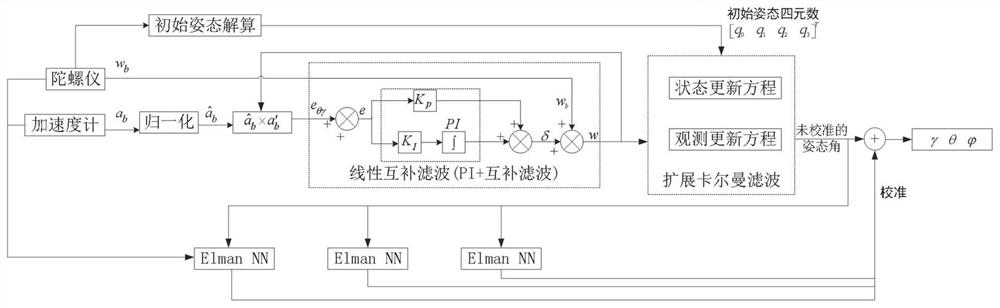
[0056] Step 2, the calculation module performs attitude calculation, the specific method is:
[0057] First, the linear complementary filtering algorithm filters the data processed in step 1. By fusing the high-pass filtering of the accelerometer and the low-pass filtering of the gyroscope, and performing PI integral compensation on the gyroscope data, data closer to the real measurement results are obtained;
[0058] Thirdly,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More