

Robust localization and mapping method and system based on fusion of laser and visual information
A visual information and visual technology, applied in the field of robust positioning and mapping methods and systems, can solve problems such as poor positioning accuracy, poor mapping effect, and insufficient information, so as to make up for the lack of closed-loop capabilities and improve relocation efficiency , The effect of precise robot pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
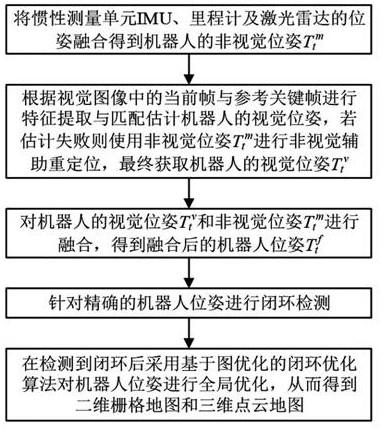
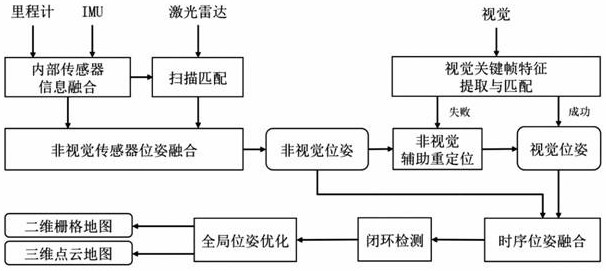
[0051] like figure 1 and figure 2 As shown, the robust positioning and mapping method for fusion of laser and visual information in this embodiment includes:
[0052] 1) The non-visual pose of the robot is obtained by fusing the poses of the inertial measurement unit IMU, odometer and lidar T t m , which can eliminate the cumulative error generated by the inertial measurement unit IMU over time;
[0053] 2) According to the current frame in the visual image and the reference key frame, perform feature extraction and matching to estimate the visual pose of the robot. If the estimation fails, use the non-visual pose T t m Perform non-visual assisted relocation, and finally obtain the visual pose of the robot T t v ;
[0054] 3) The visual pose of the robot T t v and non-visual pose T t m Perform fusion to obtain the fused robot pose T t f ;
[0055] 4) For the fused robot pose T t f Carry out closed-loop detection, and use a closed-loop optimization algo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More