

Manta ray-imitating underwater soft robot based on liquid dielectric driver
A drive and dielectric technology, applied in underwater operation equipment, propulsion device engines, ship propulsion, etc., can solve the problems that cannot be put into practical industrial use, high driving noise, slow movement speed, etc., achieve low resistance, low energy consumption, The effect of reducing size and weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The following is exemplary, and is intended to be used to illustrate the invention without understanding the limitation of the invention.
[0037] In the description of the invention, it is to be understood that the terms "center", "longitudinal", "horizontal", "length", "width", "thickness", "upper", "under", "front", " After "," left "," right "," vertical "," horizontal "," top "," bottom "," inside "," outside "," clockwise "," counterclockwise "or other indication or The location relationship is based on the orientation or positional relationship shown in the drawings, is merely intended to be described, and not indicating or implying that the device or component must have a specific orientation, with a specific directional configuration and operation. It is therefore not to be understood to limit the limitations of the invention.
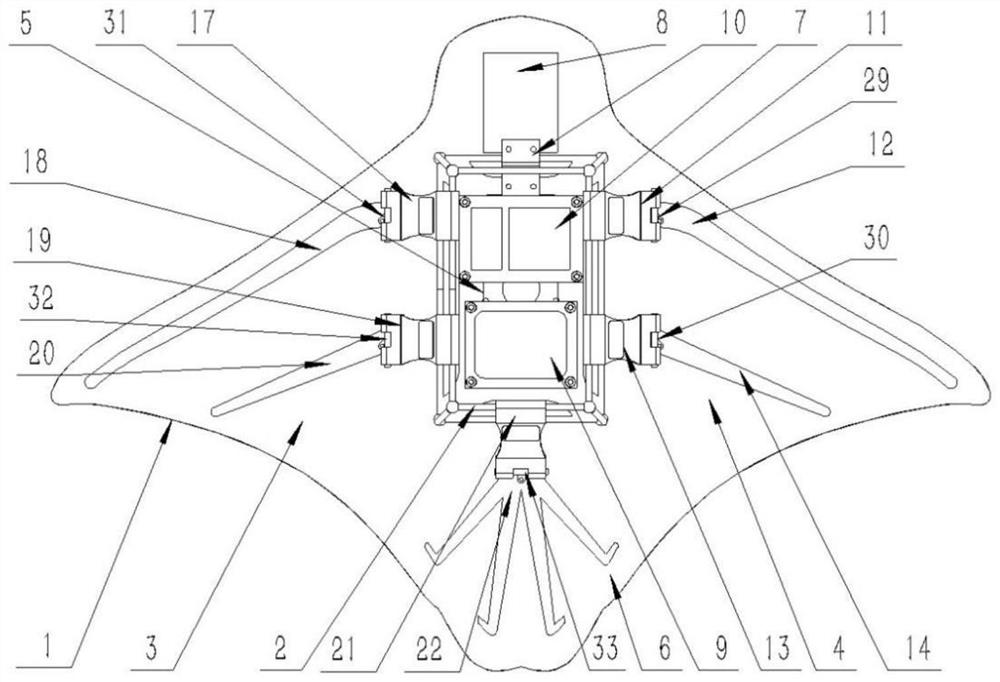
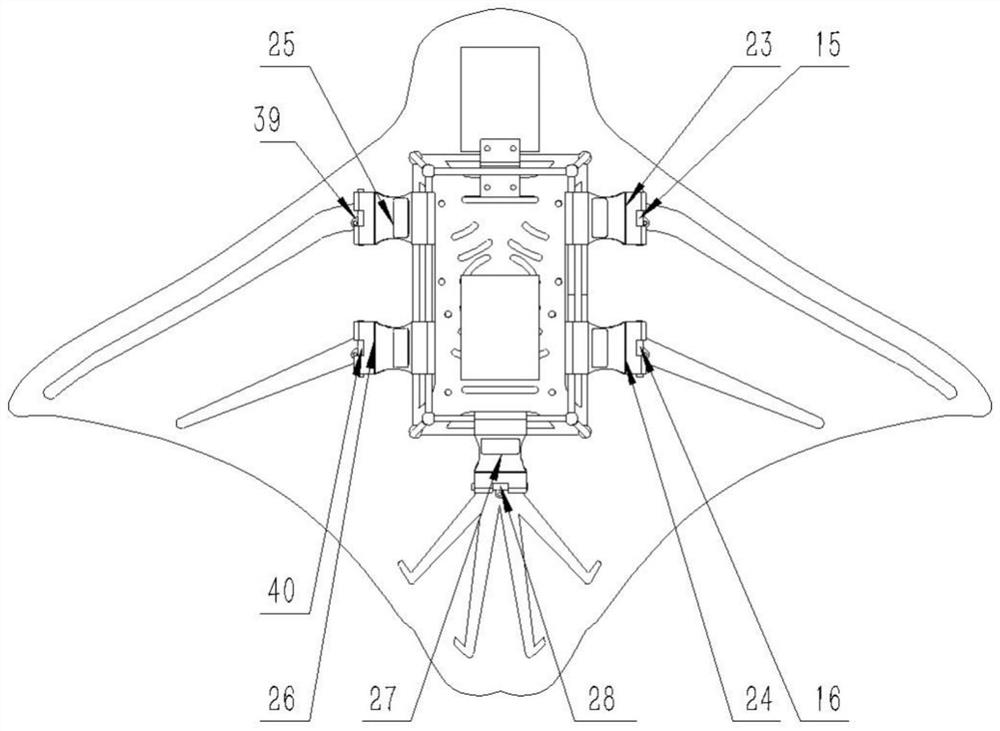
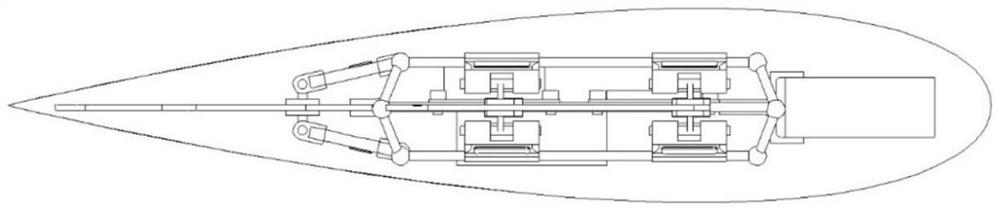
[0038] Join Figure 1-4 Attachment Figure 9-11 Describe the structure of the robot. An imitation bounce based on a liquid dielectric driver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More