

A Keyless Phase Order Tracking Method for Speed Fluctuation of Rotating Machinery
A technology for speed fluctuations and rotating machinery, applied in the measurement of ultrasonic/sonic/infrasonic waves, testing of machines/structural components, instruments, etc., can solve problems such as inability to extract time-domain waveforms, poor calculation accuracy, etc., to reduce the cost of fault diagnosis, Effects with a clear amplitude and a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
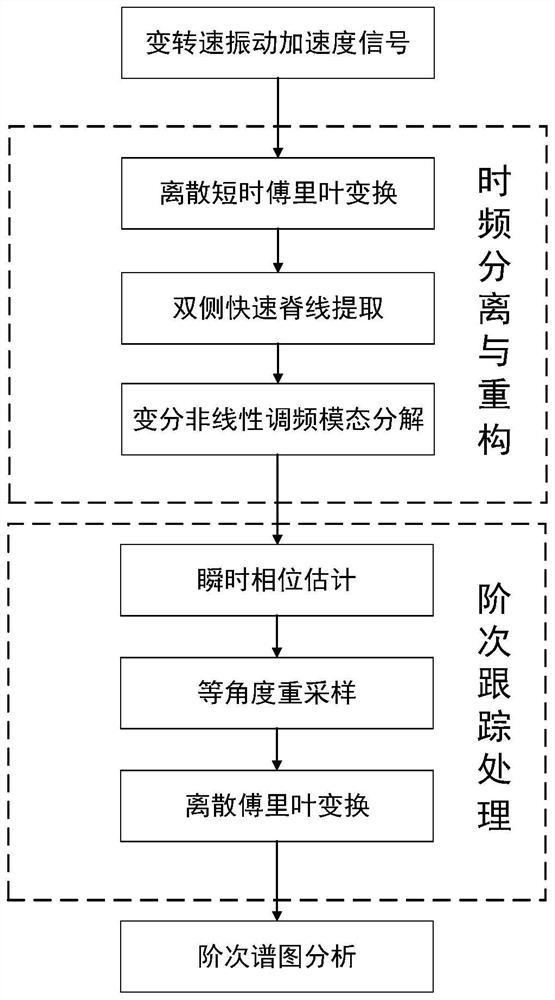
[0150] Such as figure 1 As shown, it is a keyless phase order tracking method for the speed fluctuation of rotating machinery. Assuming that the variable speed vibration signal is x(t), the method specifically includes the following steps:
[0151] Step 1: Install a vibration acceleration sensor near the rotating machinery to collect the vibration acceleration signal x(t) during variable speed operation;
[0152] Step 2: Perform discrete short-time Fourier transform (STFT) on the collected signal to obtain the time-frequency expression TFR(t,f), which specifically includes the following steps:
[0153] Step 201: Set the window function length N W and Fourier points L F , to construct the corresponding window function g(t):
[0154]
[0155] In the formula, σ is the window function coefficient;
[0156] Step 202: Perform discrete short-time Fourier transform (STFT) on the variable speed vibration acceleration signal x(t) to obtain the time-frequency expression TFR(t,f): ...
Embodiment 2
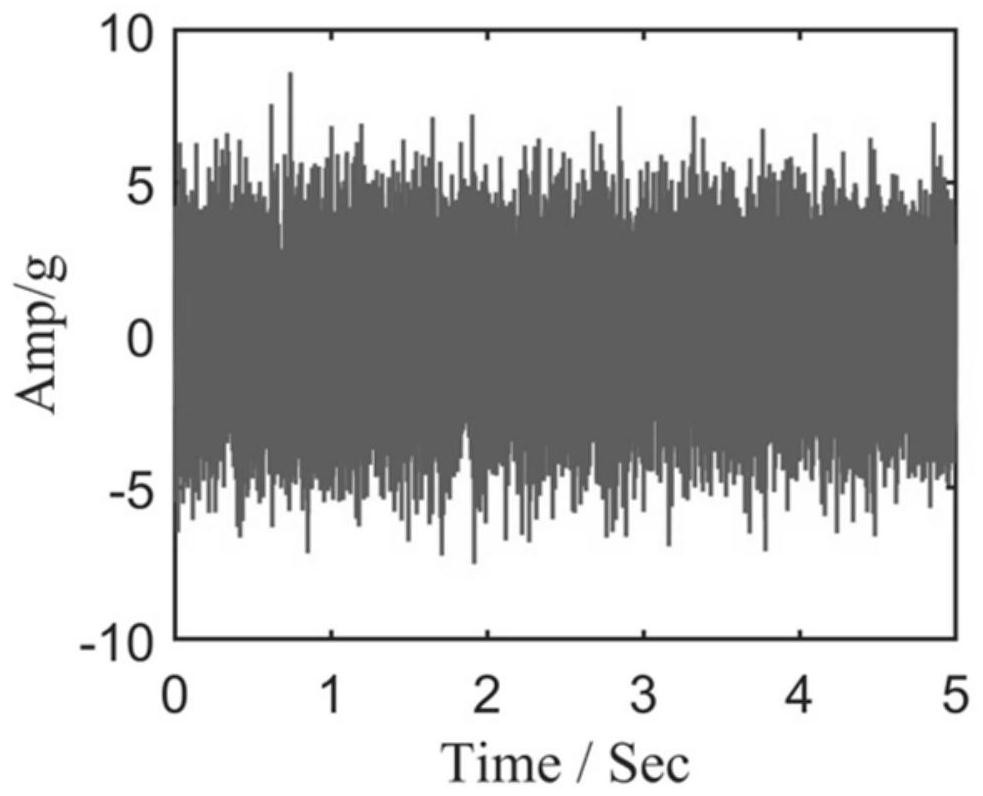
[0241] Such as figure 2 As shown, it is a second embodiment of the keyless phase order tracking technology for rotational speed fluctuations of rotating machinery. The vibration simulation signal x(t) of the gearbox is constructed, and the instantaneous rotational frequency of the reference shaft is:
[0242] f(t)=[500+1000*sin(2π·0.1t)] / 50 (40)
[0243] The amplitude modulation and phase modulation functions caused by the fault are:
[0244]
[0245] The gearbox vibration signal x(t) is:
[0246]
[0247] The concrete implementation result of this embodiment is as follows:
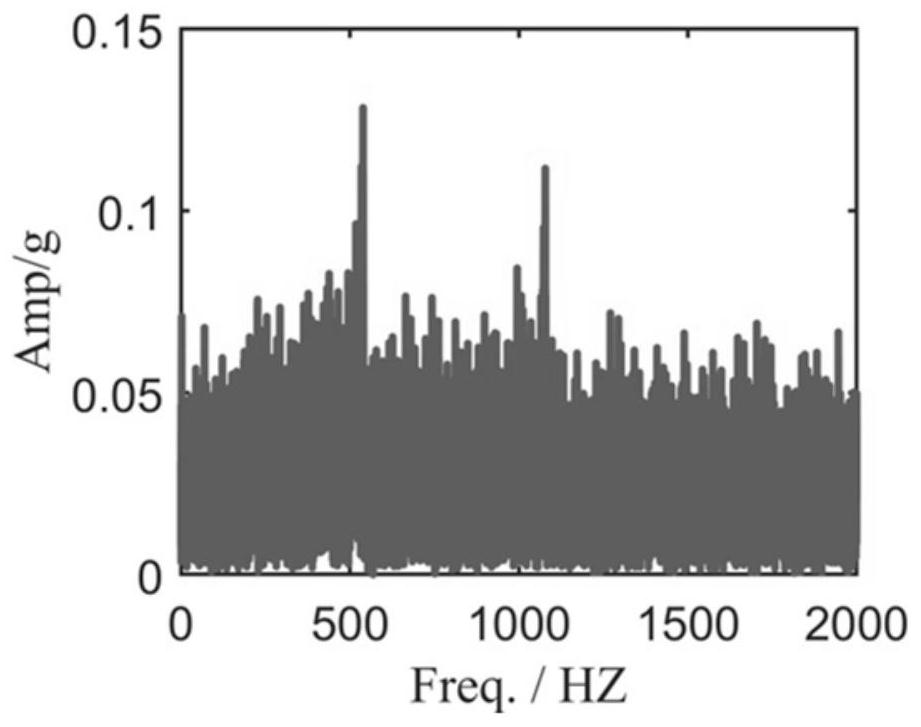
[0248] Set the basic parameters of the variable speed vibration signal: the highest meshing frequency order K=2, the number of faulty gear teeth N=16, the amplitude of the kth order meshing frequency X k = 1, initial phase Signal sampling frequency Fs=4000Hz, sampling time t=5s, signal-to-noise ratio SNR=-6dB.
[0249] Using the fast Fourier transform (FFT) method, the gearbox vibration signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More