

An Underwater Acoustic Channel Tracking and Prediction Method Based on Inertial Information
An underwater acoustic channel and prediction method technology, applied in the field of signal processing, can solve problems affecting the performance of underwater acoustic positioning and difficulty in maintaining reliable communication, and achieve the effects of improving robustness, suppressing environmental noise, and improving the accuracy of parameter estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0035] Specific implementation mode one: refer to Figure 1 to Figure 4 Specifically illustrate this embodiment, a kind of underwater acoustic channel tracking and prediction method based on inertial information assistance described in this embodiment, comprises the following steps:
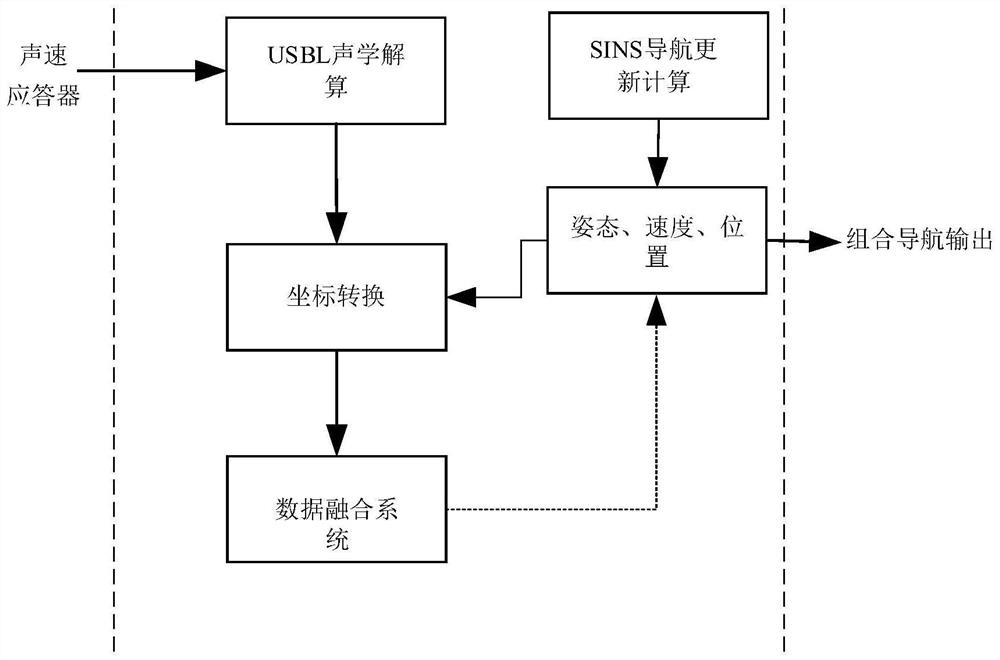
[0036] Step 1. During the normal working period of the ultra-short baseline, the ultra-short baseline installed on the aircraft performs data interaction with the subsea transponder to obtain the ultra-short baseline positioning result;
[0037] Step 2, according to the ultra-short baseline positioning result in step 1, combined with the attitude and position information of the aircraft provided by the inertial navigation system, through the inertial navigation / ultra-short baseline integrated navigation, determine the combined navigation output position, speed and heading information;
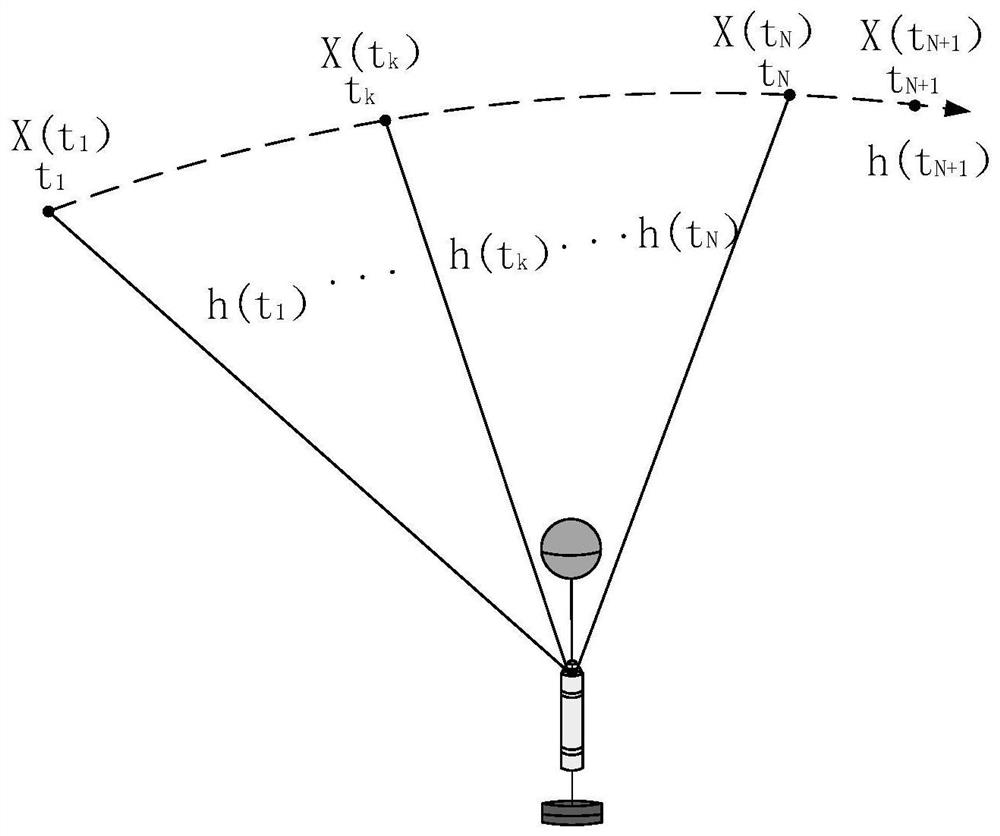
[0038] Step 3, on the basis of the normal operation of the ultra-short baseline in step 1, perform channel esti...
specific Embodiment approach 2
[0044] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in step 1, data interaction is performed with the transponder according to the ultra-short baseline, and the acoustic position calculation model of the ultra-short baseline is:
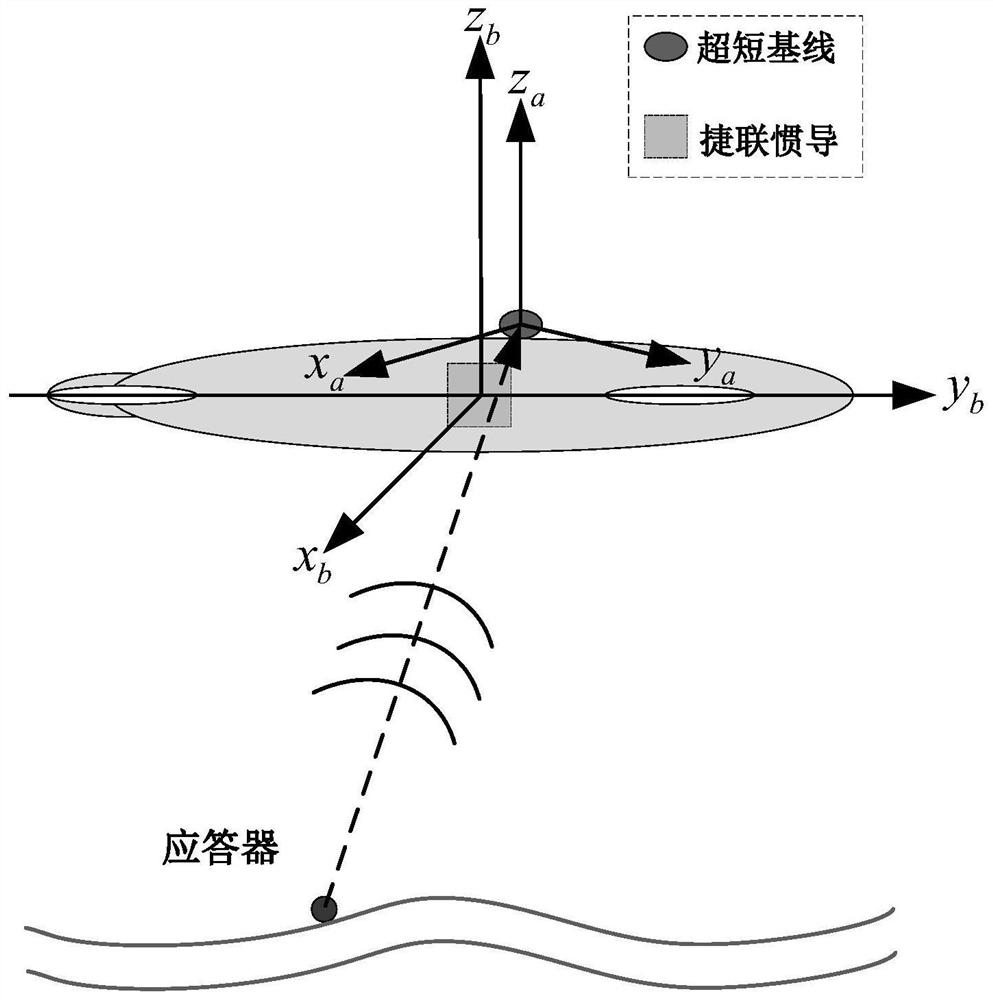
[0045] Establish the matrix coordinate system a, with the center of the acoustic matrix as the origin o a , the heading direction of the underwater vehicle along the plane of the acoustic matrix is y a axis, z a The axis is perpendicular to the matrix plane upwards, x a 、y a ,z a form a right-handed coordinate system;
[0046] The position of the transponder in the matrix coordinate system for:
[0047]
[0048] Where: R is the propagation distance of the acoustic signal between the underwater vehicle and the transponder, respectively for transponders at x a Axis position, y a Axis position and z a Axial position; cosθ x is the beacon at x a The ratio of the position in the axial dir...
specific Embodiment approach 3
[0051] Specific implementation mode three: the difference between this implementation mode and specific implementation mode two is: in the step two, under the normal working conditions of the ultra-short baseline, the specific implementation scheme of inertial navigation / ultra-short baseline integrated navigation is:
[0052] Establish the carrier coordinate system b, select the "right-front-up" right-handed coordinate system, the coordinate origin is located at the center of mass of the carrier, and the coordinate axis x b 、y b and z b Respectively pointing to the right along the transverse axis of the carrier, forward along the longitudinal axis of the carrier and upward along the vertical axis of the carrier;
[0053] To establish the navigation coordinate system n, the geographic coordinate system is generally selected and defined by the "East-North-Sky" right-handed coordinate system. The origin of the northeast sky is located at the center of mass of the carrier, x g 、...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More