3D printing device of tissue compensation film for radiotherapy
A technology of tissue compensation and radiation therapy, applied in the field of medical devices, can solve the problem of insufficient target dose and achieve the effect of quantitative measurement structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
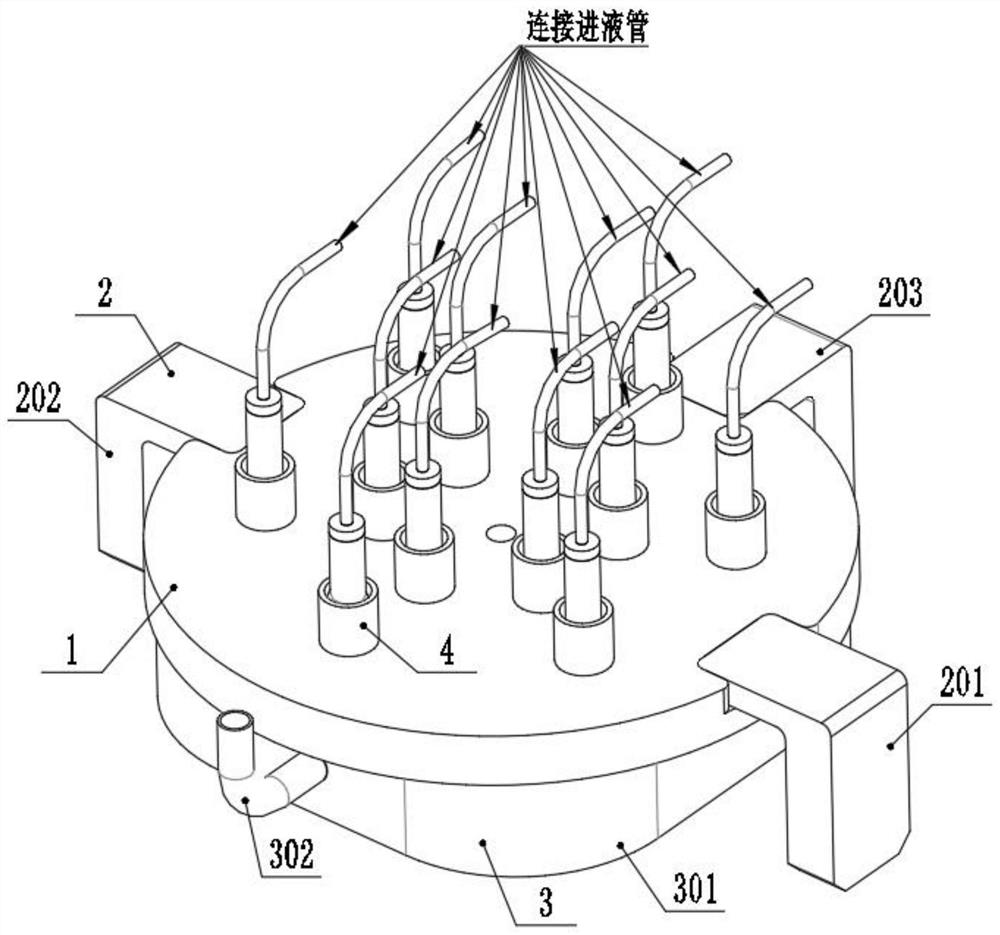
[0026] see Figure 1-5 , the present invention provides a technical solution: a 3D printing device for tissue compensation membranes for radiotherapy, including a base plate 1, characterized in that: the upper end of the base plate 1 is fixedly connected with a positioning mechanism 2, and the lower end of the base plate 1 is fixedly connected with an airbag mechanism 3, The middle of the base plate 1 is provided with a plurality of groups of through holes 1, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



