

Mobile robot path planning method for optimizing turning angle
A mobile robot and path planning technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of low time efficiency, unsatisfactory search efficiency, and affecting the working efficiency of robots, and achieve small turning angles and narrow The effect of time complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
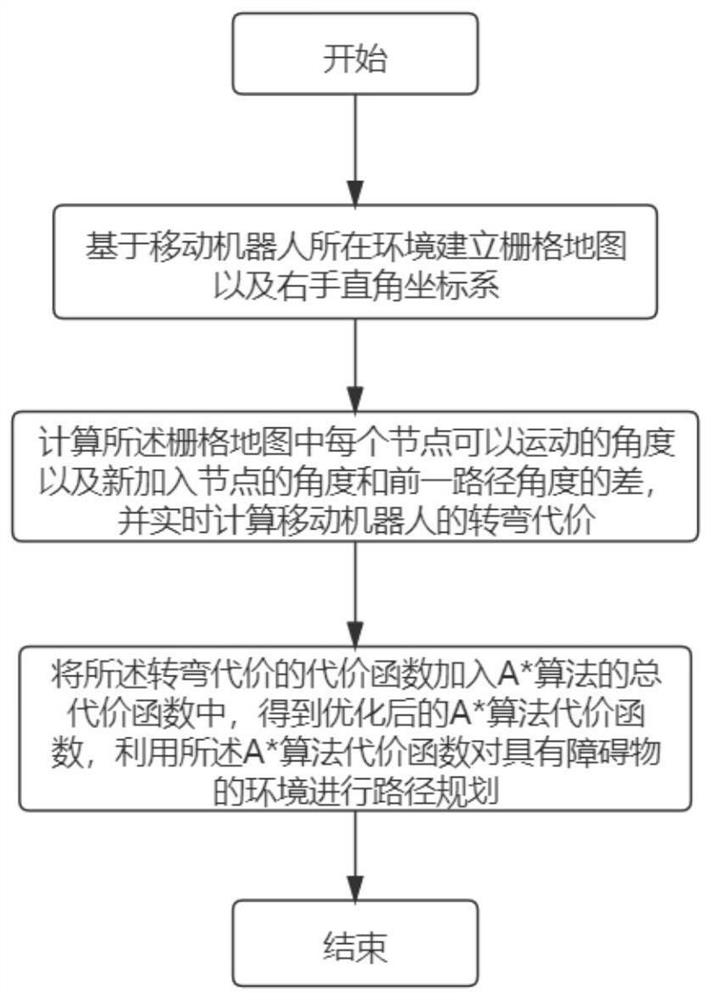
[0033] refer to figure 1 , as an embodiment of the present invention, provides a mobile robot path planning method for optimizing the turning angle, including:
[0034] S1: Establish a grid map and a right-handed rectangular coordinate system based on the environment where the mobile robot is located;
[0035] Among them, the establishment of the right-handed rectangular coordinate system includes:
[0036] Establish a right-handed Cartesian coordinate system with the current node as the origin and the right side as the horizontal axis.
[0037] S2: Calculate the movable angle of each node in the grid map and the difference between the angle of the newly added node and the angle of the previous path, and calculate the turning cost of the mobile robot in real time;
[0038] Specifically, when performing path search on a grid map, the movement direction of each node is limited to the directions of its eight adjacent nodes, and the angles at which each node can move include:
...
Embodiment 2
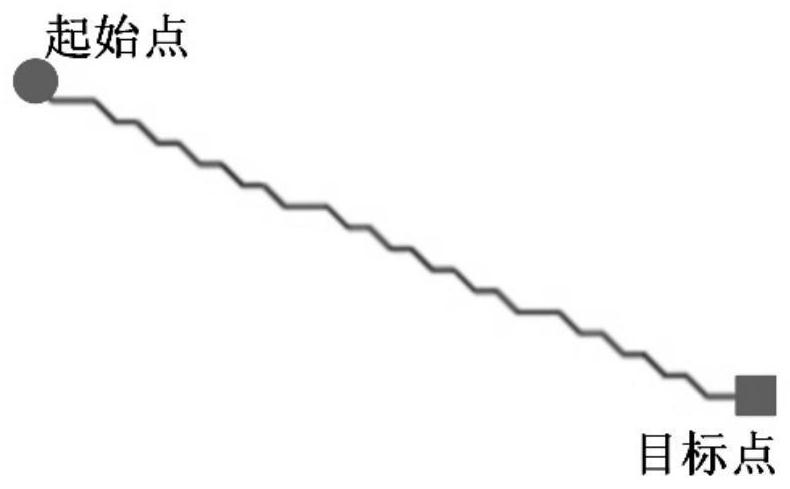
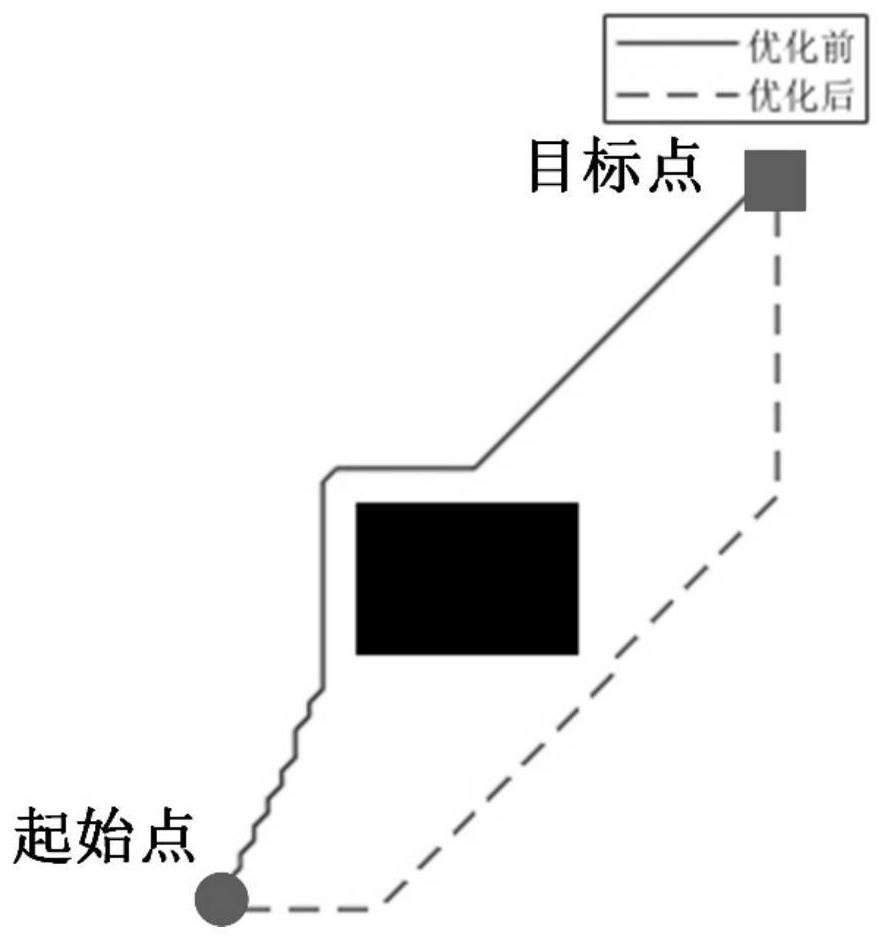
[0053] refer to Figure 2~3 It is another embodiment of the present invention. This embodiment is different from the first embodiment in that it provides a verification test of a mobile robot path planning method for optimizing the turning angle. In order to verify the technical effect adopted in this method, In this embodiment, a comparison test is carried out between the traditional technical scheme and the method of the present invention, and the test results are compared by means of scientific demonstration, so as to verify the real effect of the method.
[0054] Such as figure 2 As shown, the path given by the traditional classic A* algorithm has many unnecessary turns, which will greatly affect the work efficiency of the robot; in order to verify that this method has higher work efficiency than the traditional method, therefore, in this embodiment, The traditional A* algorithm and this method are used to measure and compare the working efficiency of the mobile robot in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More