

Mars elliptical orbit image motion compensation control ground verification system
A technology of image motion compensation and elliptical orbit, which is applied in the field of spacecraft testing, can solve the problems of difficulty in imaging near-fire arcs and low accuracy of orbit determination, and achieve the effects of good adequacy, improved verification efficiency, and reduced test costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
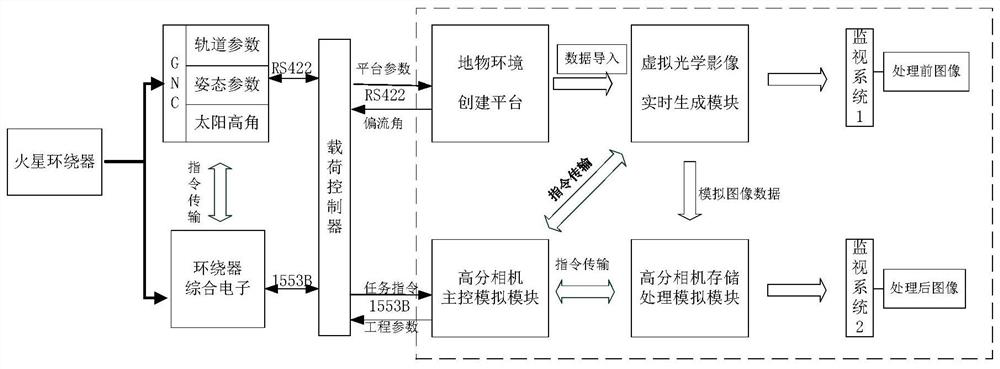
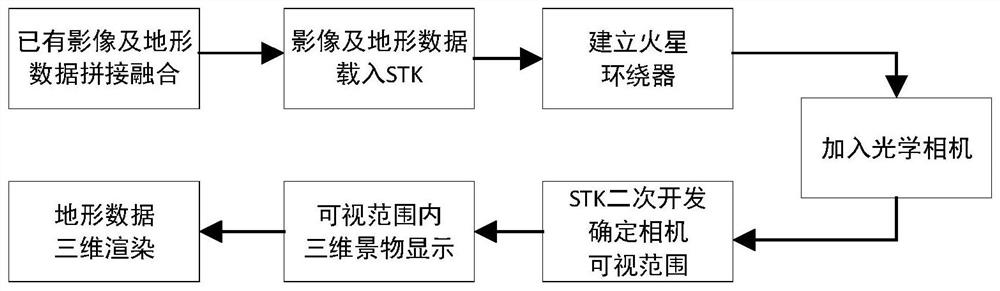
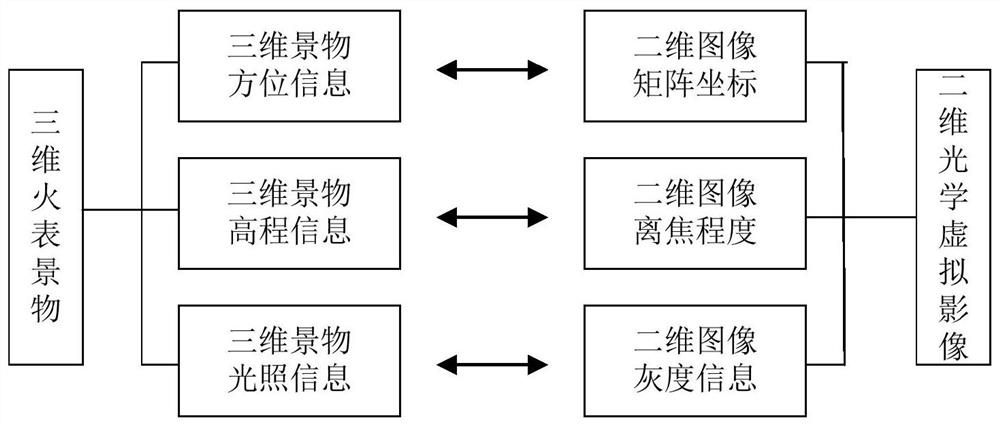
[0039] The present invention provides a Mars elliptical orbit image motion compensation control ground verification system, which establishes a one-to-one mapping relationship between attitude and orbit control parameters and virtual optical effects by means of three-dimensional scene generation and virtual optical imaging. The software simulation method intuitively presents the imaging results of the interactive control between the attitude-orbit control system and the optical imaging payload, and reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More