

Magnetic robot driving device
A driving device and robot technology, applied in electromechanical devices, electric components, electrical components, etc., can solve the problems of large friction between the permanent magnet and the partition part, large heat generation, small working space, etc., to achieve large-scale adjustment, reduce Coupling effect, pure effect of output magnetic field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
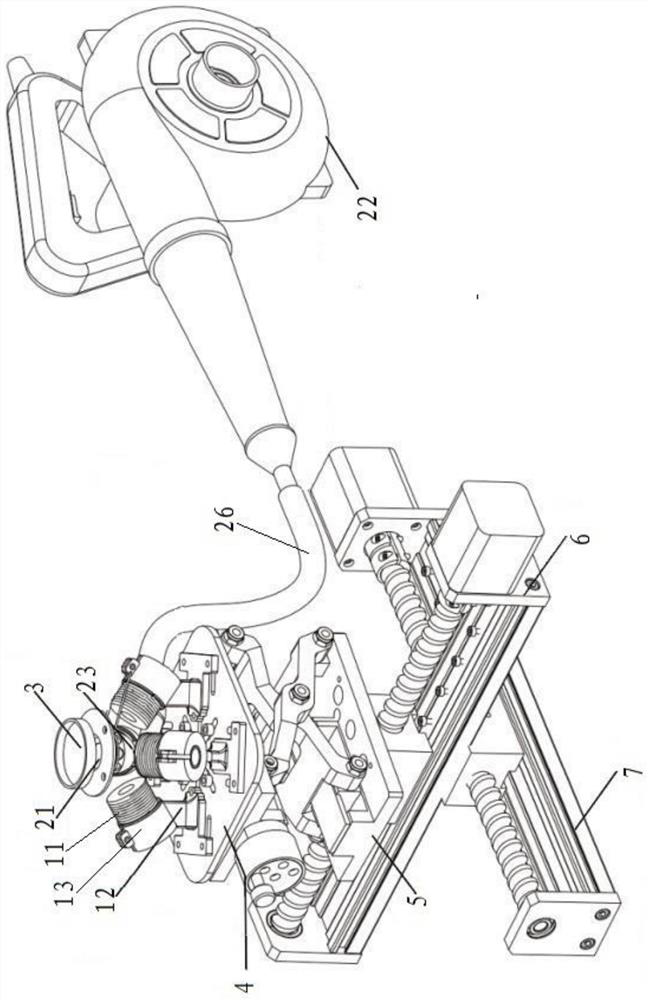
[0041] see figure 1 and figure 2 , as shown in the legend therein, a magnetic robot driving device includes a driving device body unit, and the above-mentioned driving device body unit includes:
[0042] A plurality of electromagnetic modules 1, each of the above-mentioned electromagnetic modules 1 includes an electromagnetic coil 11 that generates a magnetic field after being energized and a first bracket assembly for supporting the above-mentioned electromagnetic coil, and a plurality of the above-mentioned electromagnetic modules generate a composite magnetic field;
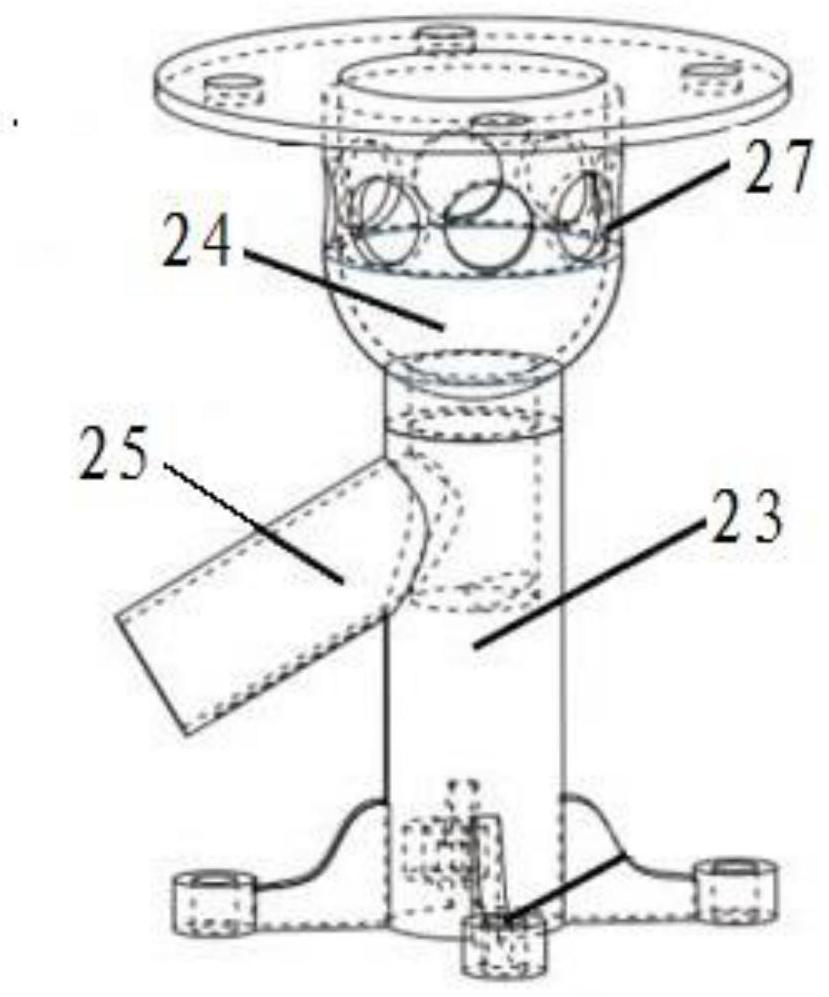
[0043] A permanent magnet module 2, the permanent magnet module 2 includes a spherical permanent magnet 21 that generates a driving magnetic field after moving under the action of the above-mentioned composite magnetic field, a blower 22 for providing airflow, and is used to support the spherical permanent magnet 21 and guide the airflow to the above-mentioned Below the spherical permanent magnet 21 is a sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More