

Permanent magnet synchronous motor control method
A permanent magnet synchronous motor and control method technology, applied in motor control, motor generator control, AC motor control, etc., can solve the problems of long arrival time, large system buffeting, long system arrival time, etc., and increase the response speed. and approach speed, good dynamic performance, avoid blindness effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
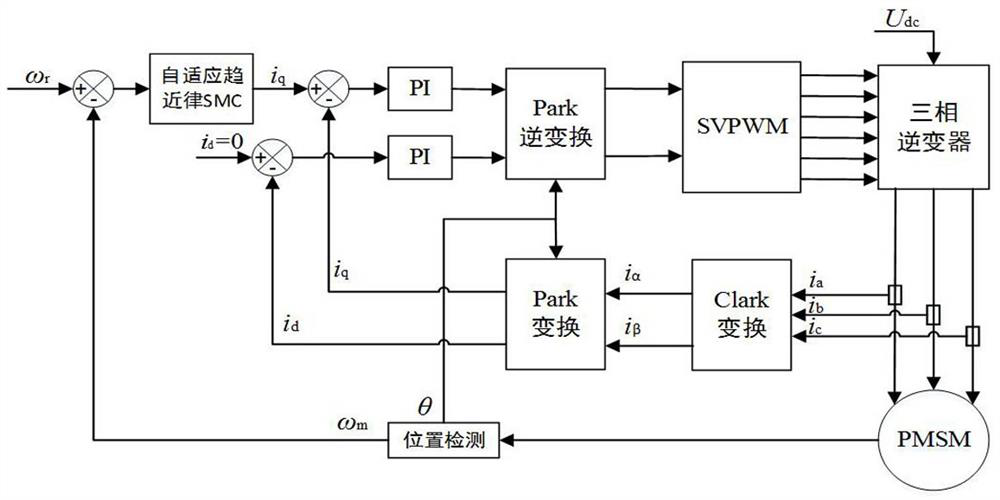
[0039] This embodiment discloses a control method for a permanent magnet synchronous motor, specifically a novel adaptive reaching law sliding mode control method for a permanent magnet synchronous motor, including the following content: the PMSM control strategy adopts speed and current double closed-loop control, and the current loop adopts In the traditional PI controller, the speed loop adopts a sliding mode controller based on a new adaptive reaching law; the motor speed given value ω r The motor speed ω measured with the position detector mThe speed deviation obtained by the subtractor is used as the input of the sliding mode controller, and the command value output by the sliding mode controller is given to the current loop iq. The new adaptive reaching law is based on the power reaching law, combined with the power function tansig, and introduc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More