


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
High-sensitivity flexible magnetostrictive tactile sensor array for manipulator
A tactile sensor, high-sensitivity technology, applied in the direction of measurement, instrument, measuring device, etc. by measuring the change of magnetic properties of materials caused by applied stress, which can solve the problem that objects with low sensitivity, large size, and similar hardness cannot be accurately distinguished, etc. problem, to protect from damage, improve flexibility and smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
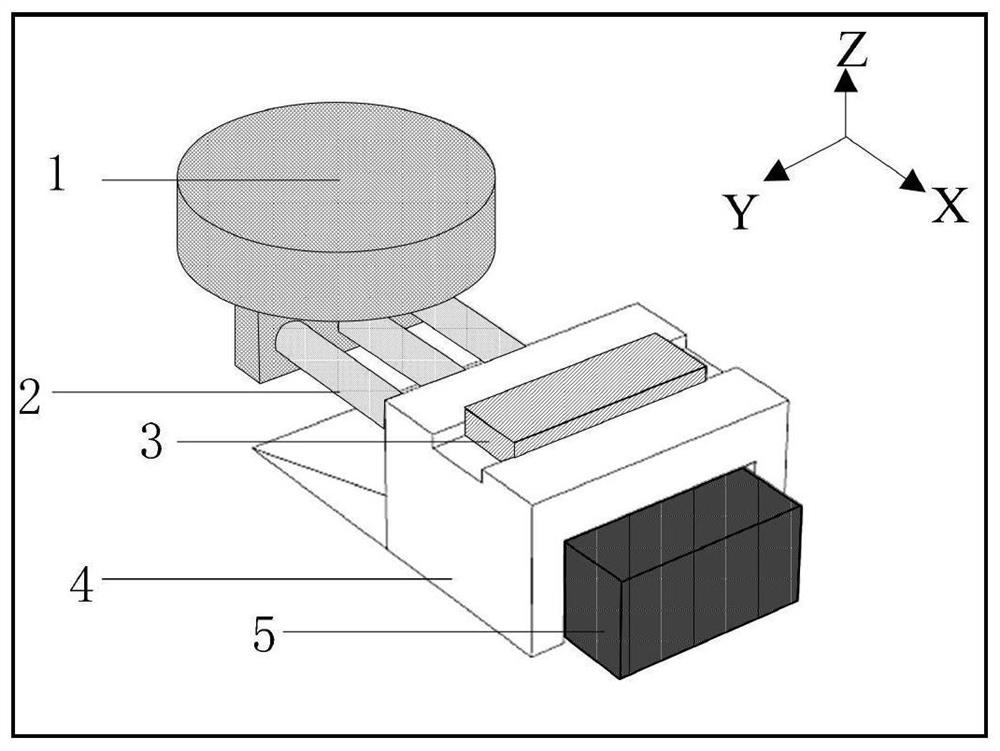
[0063] Embodiment 1: Using a TMR element as a magnetic field sensor, a gallium iron wire with a length of 6 mm and a diameter of 0.4 mm is applied in the range of 0-4N to the relationship between the pressure and the output voltage. The main purpose of this embodiment is to study the input-output correspondence of the tactile sensing unit and the force measurement sensitivity.
[0064] Experimental platform construction: according to figure 1 and Figure 6 As shown, the tactile sensing unit is assembled according to the design structure to form a 2×5 tactile sensing array; this experimental platform is composed of a digital push-pull force meter, an adjustable DC power supply, a DH-8303 data acquisition card, and a computer; The sensing array is fixed on the base of the digital push-pull force gauge, and the position of the dowel bar of the push-pull force gauge is adjusted so that it faces any unit of the sensing array; the output mode of the push-pull force gauge is set so...
Embodiment 2
[0067] Embodiment 2: The high-sensitivity flexible magnetostrictive tactile sensor array is installed to the one-sided finger of three-finger manipulator (Righthand: ReFlex2) (the one side of described three-finger manipulator is two fingers arranged in parallel, and the other side is one Separately arranged fingers, unilaterally refers to the inner surface of one side with only one finger), so that the sensor array can completely cover the entire phalanx of the manipulator. The computer is used to control the grasping speed and displacement distance of the manipulator to keep it consistent in the process of multiple grasping, and to grasp the rubber cylinder with the same shape and volume and a Shore hardness difference of 10 degrees.
[0068] Experimental process and results: Adjust the grabbing angle and grabbing position of the three-finger manipulator so that the tactile sensor array installed on the surface of the robot finger bone can completely adhere to the surface of ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| thickness | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
| length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com