

Bottle-shaped object positioning and grabbing method in mobile composite robot application
A mobile robot, robot technology, applied in two-dimensional position/channel control, instruments, motor vehicles and other directions, can solve the problems of measurement accuracy affecting operation accuracy, complicated calculation, insufficient navigation accuracy, etc., to improve positioning accuracy and real-time performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to facilitate those skilled in the art to understand the technical content of the present invention, the content of the present invention will be further explained below in conjunction with the accompanying drawings.
[0041] Such as Figure 6 Shown is a schematic diagram of the positioning and grabbing structure of the mobile robotic arm, which includes: AGV trolley 1, robotic arm 2, monocular camera 3, electric gripper 4, object to be grasped 5, and workbench 6; the robotic arm 2 is installed on the AGV trolley 1, the monocular camera 3 and the electric gripper 4 are installed on the mechanical arm 2, and the object 5 to be grasped is placed on the workbench 6.
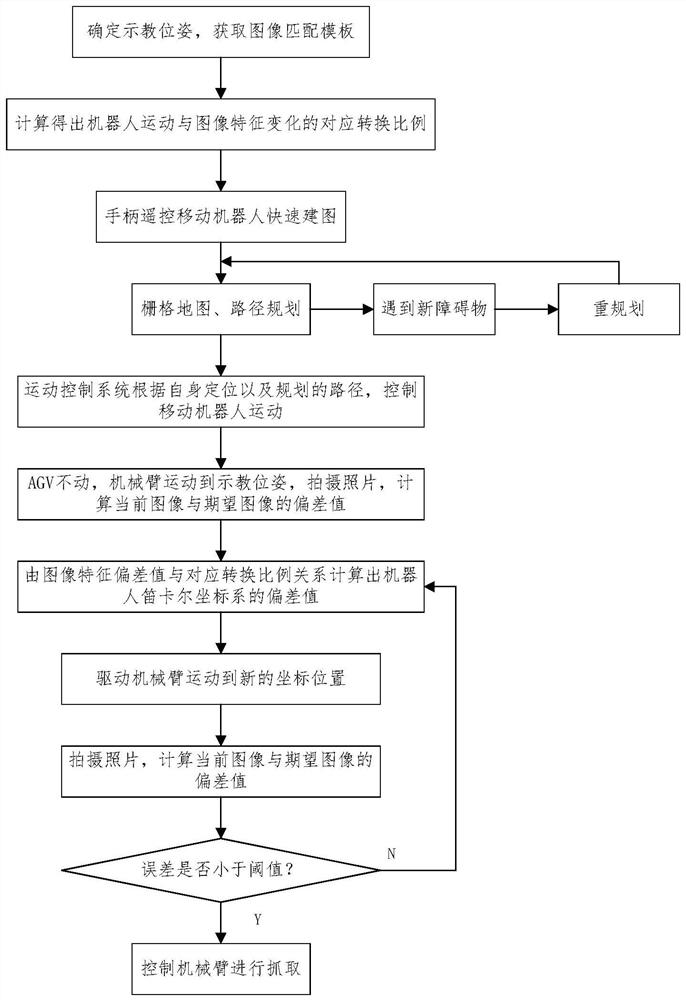
[0042] Such as figure 1 shown, based on Figure 6 A compound mobile robot positioning and grabbing method for a bottle-shaped object with the structure shown includes the following steps:
[0043]S1: The mobile robot docks at a station, uses the robot teach pendant to control the mechanical arm to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More