

Unmanned chain type excavation device, unmanned operation system and unmanned operation method
A chain-type, operation technology, applied in the direction of earth mover/shovel, mechanically driven excavator/dredger, construction, etc., can solve the problems of high labor cost, great economic impact, lack of professional equipment, etc. Achieve the effect of low labor cost, small economic impact, and reduced construction workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0036] This embodiment provides an unmanned chain excavation device for one-time molding of old subgrade steps for road reconstruction and expansion. The device is an unmanned chain excavation device driven and suspended by a walking machine.
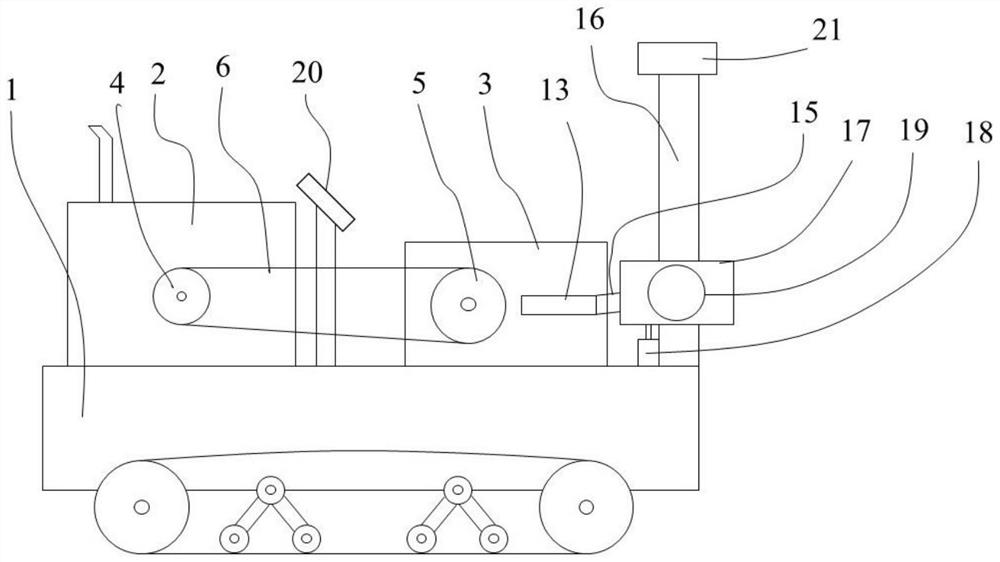
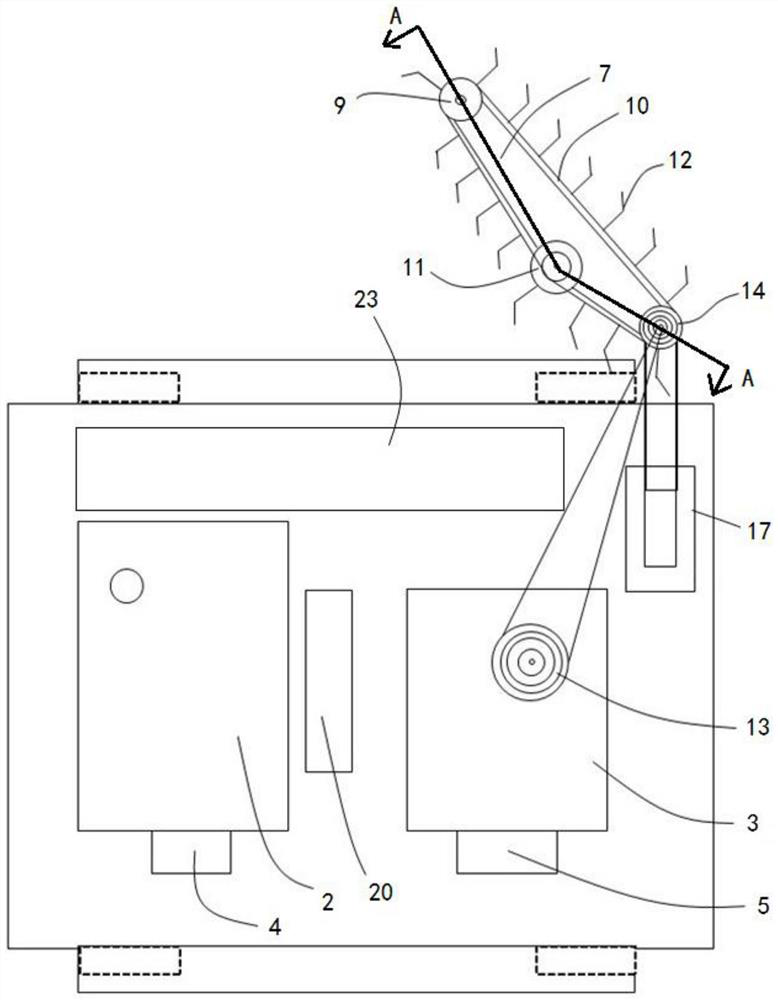
[0037] Such as figure 1 and figure 2 As shown, an unmanned chain excavation device includes a car body 1, a positioning unit, a power output unit, a job execution unit and a control processing unit.
[0038] In this embodiment, the vehicle body 1 is the vehicle body of a chain trencher.
[0039] The power take-off unit is arranged on the car body to provide driving power; the power take-off unit includes a diesel engine 2 and a speed reducer 3, the diesel engine 2 has a first power take-off shaft, and the first power take-off shaft is fixed with a pulley-4 and a speed reducer 3 has a power input shaft and a second power output shaft, the power input shaft is fixed with a pulley two 5, the first pulley 4 and the second pulley 5 are in...
Embodiment 2
[0061] This embodiment provides an unmanned operation system, which can be deployed on the entire road reconstruction and expansion step excavation construction site, such as Figure 4 As shown, the unmanned operation system provided by this embodiment includes multiple positioning base stations 24, a server 25 and at least one unmanned chain excavation device provided by Embodiment 1.
[0062] Wherein, each positioning base station 24 is all wirelessly connected with each unmanned chain type excavation device and server 25, and is used for receiving the positioning request that unmanned chain type excavation device sends, and sends positioning signal to server 25 according to positioning request; 25 is wirelessly connected with each unmanned chain excavation device, which is used to determine the position and moving direction of the unmanned chain excavation device according to the positioning signal, and send the unmanned chain excavation device to the unmanned chain excavati...
Embodiment 3
[0068] This embodiment provides an unmanned operation method, which is the operation method of the unmanned operation system in embodiment 2, that is, the unmanned step excavation construction method, and the method includes the following steps:
[0069] S10. The unmanned chain excavation device sends a positioning request to multiple positioning base stations 24 around, so that the server 55 locates the position of the unmanned chain excavation device.
[0070] Exemplarily, an ultra wide band (Ultra Wide Band, UWB) technology may be used to realize the positioning of the unmanned chain excavation device. The unmanned chain-type excavation device sends UWB signals to the positioning base station 24 every set time through the positioning tag, and the positioning base station 24 calculates the distance from the positioning base station 24 to the unmanned chain-type excavation device according to the time of receiving the UWB signal, and The distance is uploaded to the server 25,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More