

Robot control, track joining and smoothing method and system
A control method and smooth processing technology, applied in the field of robotics, to reduce strong dependence, improve service life, and ensure smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0053] A robot control method according to the present invention provides, as Figure 1 - Figure 3 As shown, including:
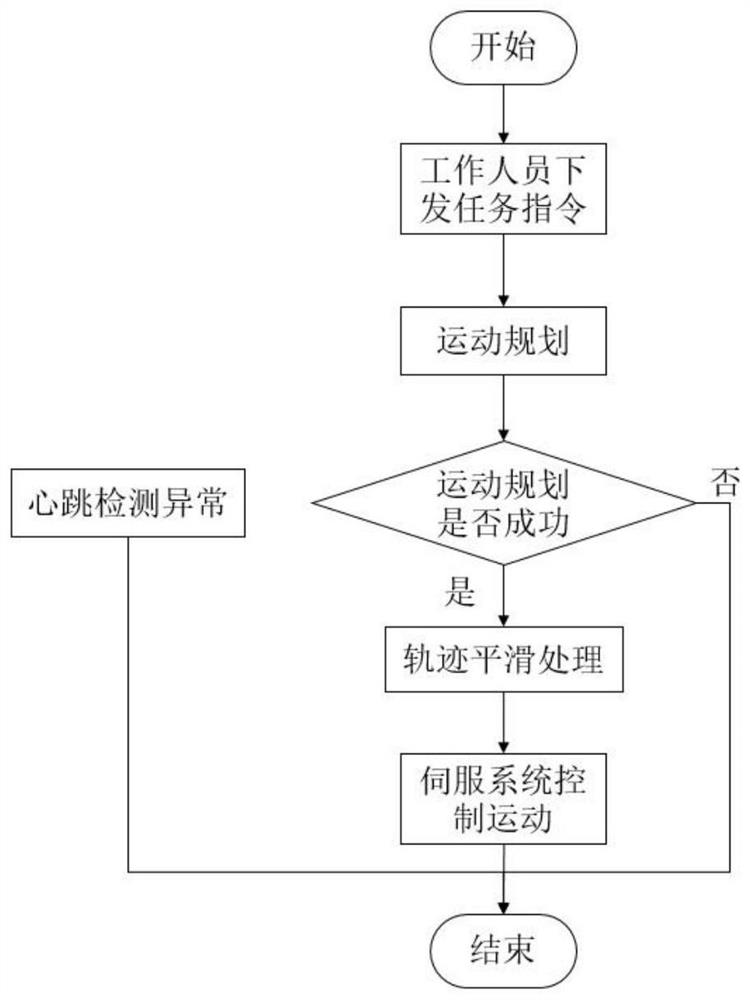
[0054] Step S1: the status display and the work needs, by the interface task instruction issued;
[0055] Step S2: The motion planning module receives a task instruction, with the current state of the robot to robot motion planning, the planning results and feedback interface;
[0056] If the plan fails, no path planning, robot remain stationary state to terminate the operation;
[0057] If the plan is successful, the planned path is sent to the trajectory of the smoothing processing module adapter, run the step S3;
[0058] Step S3: path planning module receiving the smoothing process to the planned path, automatically generating a smooth trajectory to meet the real-time sampling period process and issued to the servo system;
[0059] Step S4: execute smooth track servo system controlling the robot in accordance with the respective articulation smooth trajector...
Embodiment 2
[0065] Example 2 Example 1 is the preferred embodiment, more particularly to the present invention will be described.
[0066] A robot skilled in the art may be provided a control method of the present invention, be understood that the specific embodiments of the robot control system, i.e., the robot control system may be implemented method of control steps performed by the robot.
[0067] A robot control system according to the present invention is provided, comprising:
[0068] Module M1: The work requirements and the state displayed by the interface task instruction issued;
[0069] Module M2: motion planning module receives a task instruction, with the current state of the robot to robot motion planning, programming and feedback results through interface;
[0070] If the plan fails, no path planning, robot remain stationary state to terminate the operation;
[0071] If the plan is successful, the planned path is sent to the interface with the trajectory smoothing module execut...
Embodiment 3
[0079] Example 3 Example 1 is the preferred embodiment, more particularly to the present invention will be described.
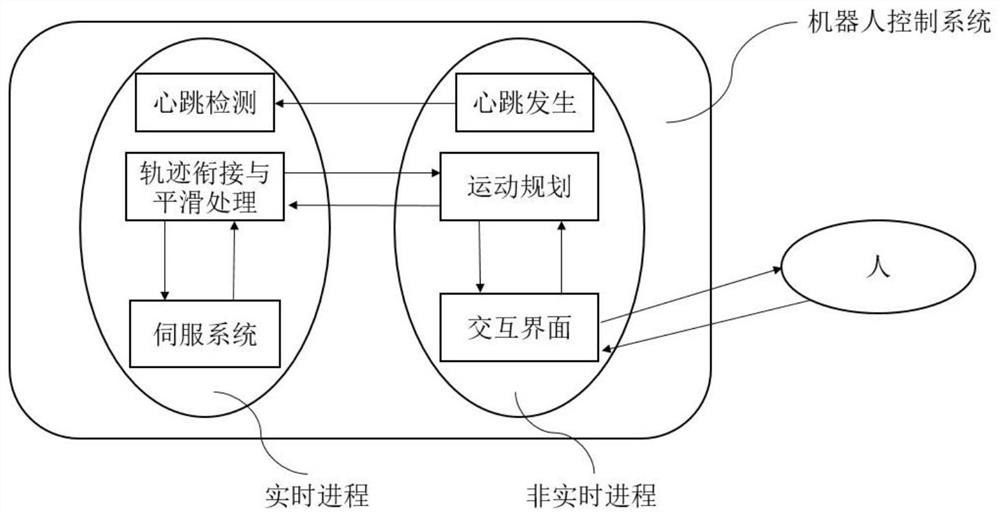
[0080] According to the present invention provides the smoothing processing based on the convergence system robot trajectory control system, comprising:
[0081] Real-time trajectory smoothing module: real-time and non-real-time process synchronization process on trajectories;
[0082] Non-real-time trajectory smoothing module: firstly converted to non-real time trace with the track, then the non-real-time processes with respect to real-time process trajectory synchronization, a servo system for generating a smooth trajectory.
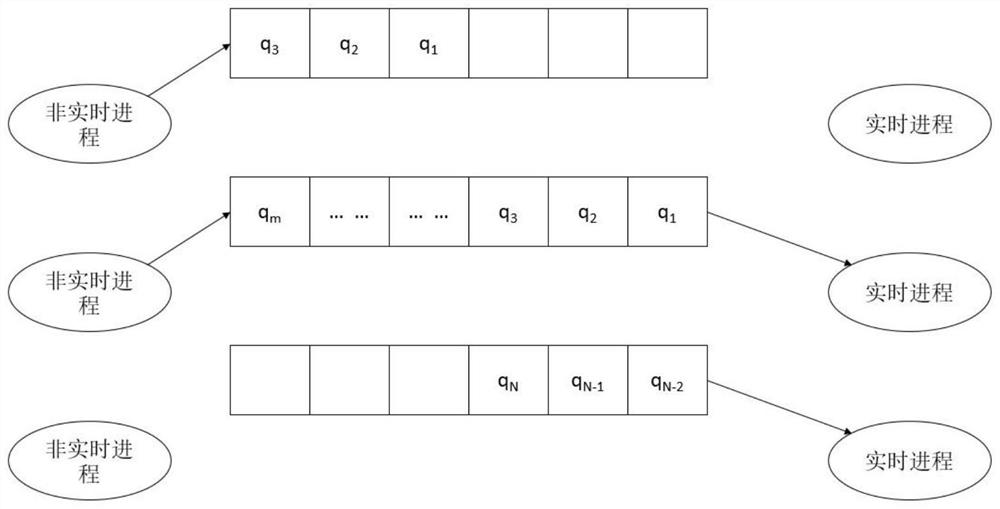
[0083] In particular, the real-time trajectory smoothing module:
[0084] Due to inconsistencies in the operation rate of non-real-time processes and the real-time process, add a piece of the track buffer queue when synchronization between the two processes, the robot hardware performance and mission requirements to provide the buffer que...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More