

Combined satellite simulator control method based on discrete high-order all-drive system method
A technology of satellite simulation and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of cumbersome process, no experimental link, difficult to realize, etc., to achieve simple model processing process and design structure. Simple and effective, the effect of sufficient design freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
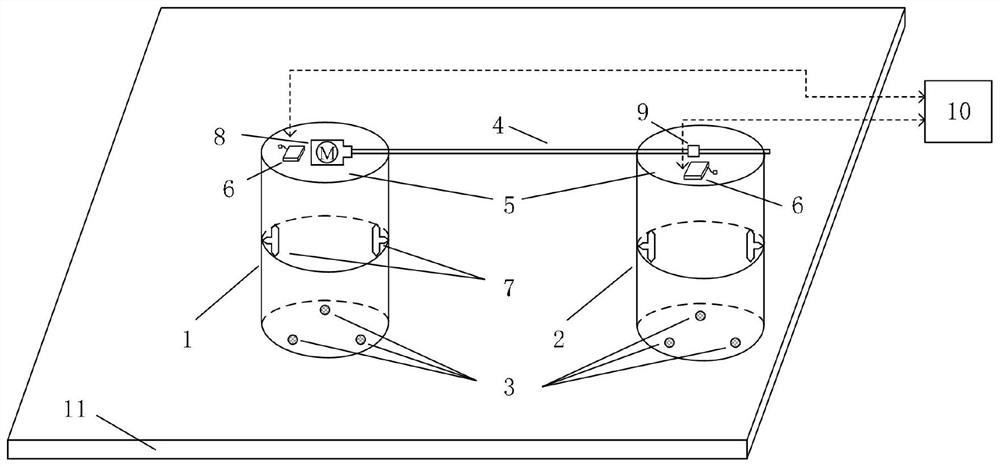
[0094] Specific implementation mode one: as figure 1 As shown, this embodiment discloses a method for controlling a combined satellite simulator based on a discrete high-order full-drive system method, and the method includes the following steps:
[0095] Step 1: Establish a discrete high-order full-drive system model for the combined satellite simulator system in the laboratory;
[0096] First, the continuous-time second-order all-drive system form of the combined satellite simulator system is given as follows:
[0097]
[0098] In formula (1), Represents the state vector, where: x c Indicates the x-coordinate of the centroid of the combined satellite simulator, y c Indicates the y-coordinate of the centroid of the combined satellite simulator, represents the yaw angle of the combined satellite simulator, T means transpose, u=[F x f y T z ] T Indicates the control input vector in the inertial coordinate system, where: F x Indicates the thrust acting in the x ...
Embodiment 1
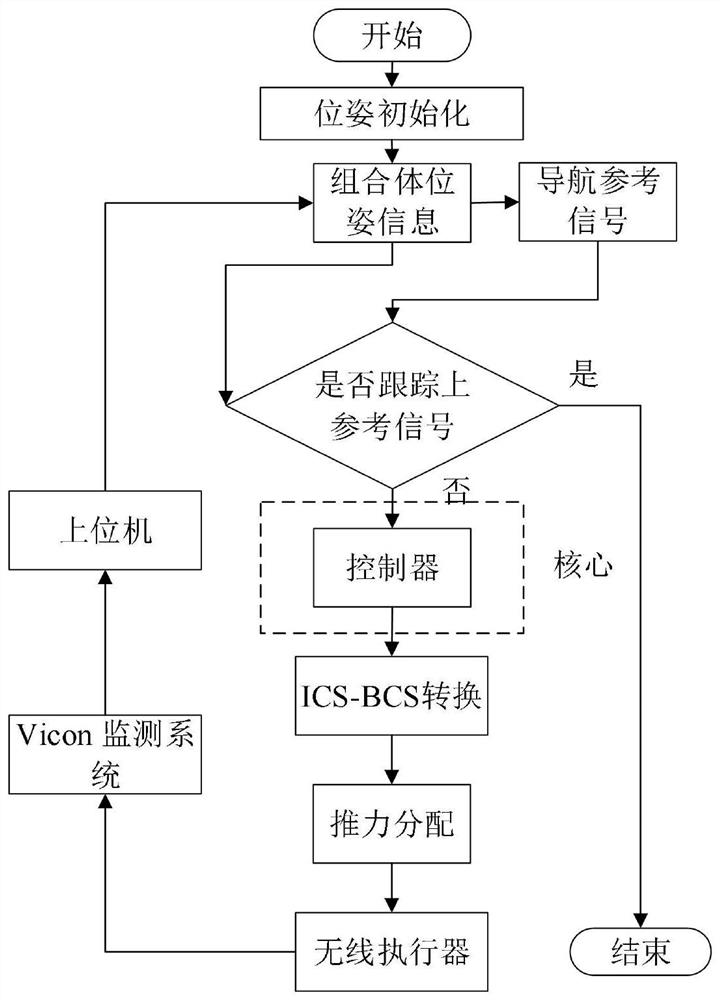
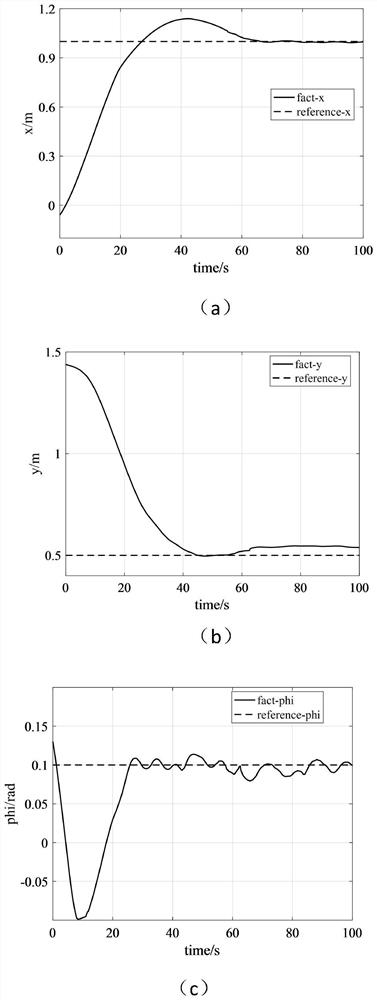
[0173] This embodiment proposes a combined satellite simulator control method based on the discrete high-order full-drive system method, in order to provide a control method for the combined satellite simulator to track a constant value signal after the simulated service star captures the target star, so its The application scenario is the research field of motion control of combined satellite simulators. At present, the control method has successfully completed the experimental verification on the basis of simulation analysis. For the application scenario where the integrated satellite simulator system tracks a specific constant value signal, the specific implementation method and experimental results for completing the experimental verification are given below.
[0174] When carrying out the experimental link of the combined satellite simulator system, the specific implementation method includes the following three steps:
[0175] Step 1: Take the combined satellite simulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More