

Craniotomy robot and system thereof
A technology of surgical robot and mechanical arm, which is applied in the field of medical equipment, can solve the problems of internal tissue injury of the skull, doctors' lack of time to retract force, and meningeal injury, etc., to avoid medical accidents, achieve linkage effects, and ensure stable movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below with reference to the accompanying drawings and examples. The same components are indicated by the same reference numerals.
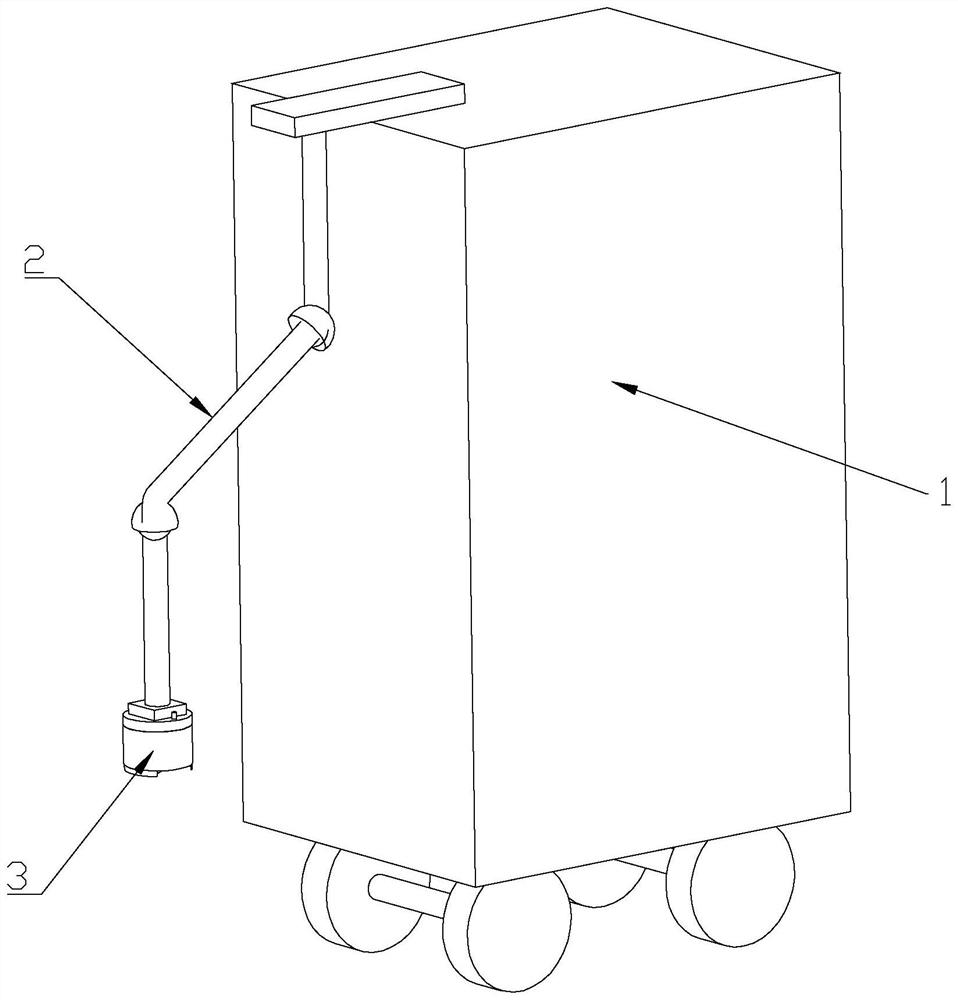
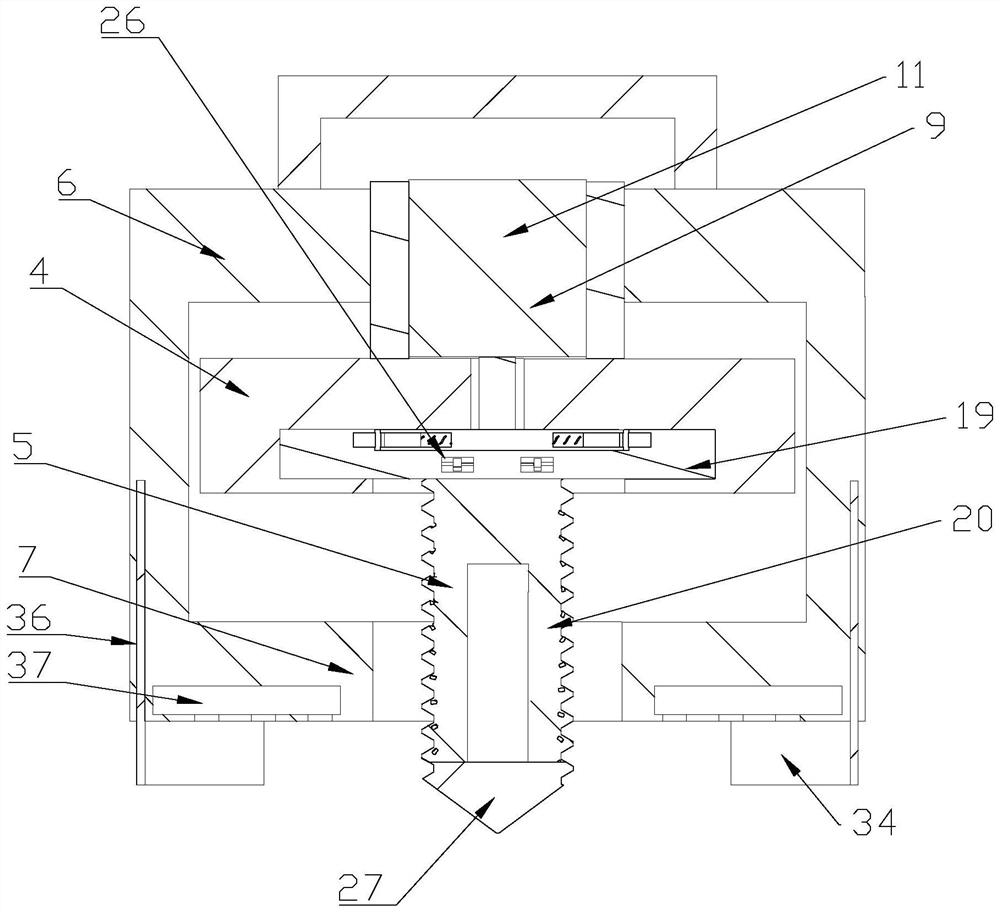
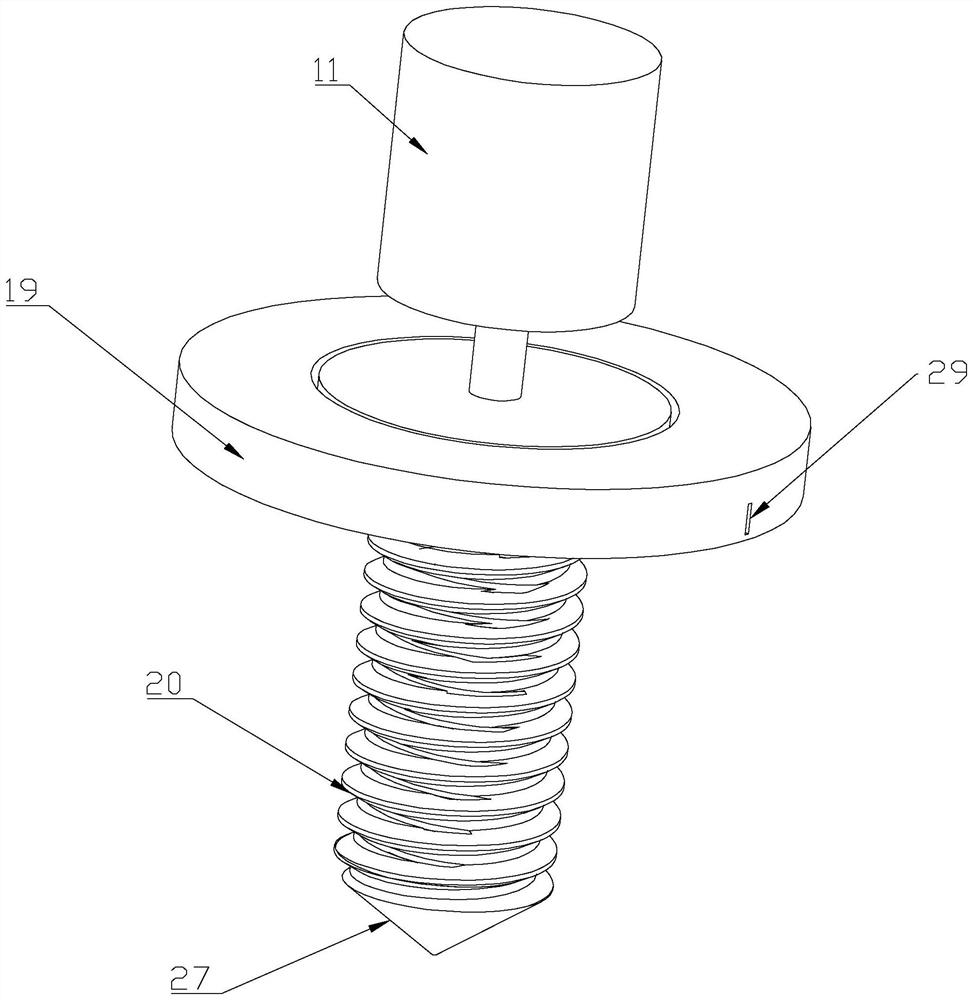
[0028] Such as Figure 1-10As shown, a craniotomy, including a frame, a moving roller having a moving roller, and a robotic arm 2 is connected to a free end connected to a craniocell. 3. In this embodiment, the robot arm 2 is a robotic arm including 5 degrees of freedom in the prior art, the craniocell member 3 including a mount 4, a drill bit 5, and a sleeve 6, the sleeve One end of the cartridge 6 is connected to the robot arm 2, and the sleeve 6 extends away from one end of the robot arm 2 to form the inner contact portion 7, the sleeve 6 to which the mounting seat 4 is used for the mounting seat 4. One end contracted, the sleeve 6 provided with a displacement assembly 8 connected to the mount 4, and the drill bit 5 is provided with a detection assembly, the detecting assembly to trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More