Hydraulic circuit including hydraulic pressure reduction energy recovery
A hydraulic circuit and hydraulic fluid technology, which is applied in the field of hydraulic circuits including hydraulic decompression energy recovery, can solve problems such as wasting energy and reducing pressure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
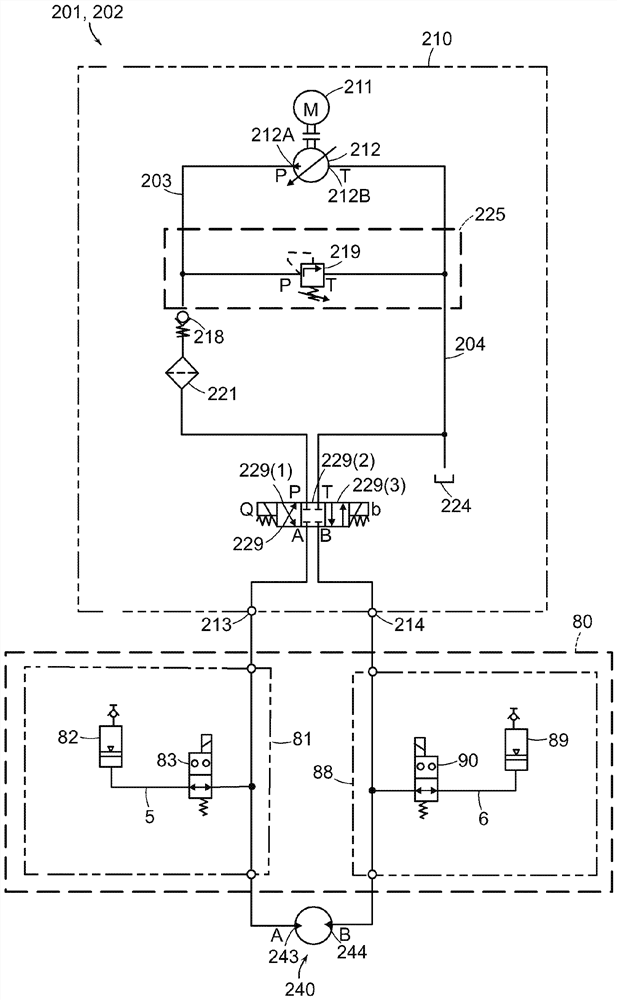
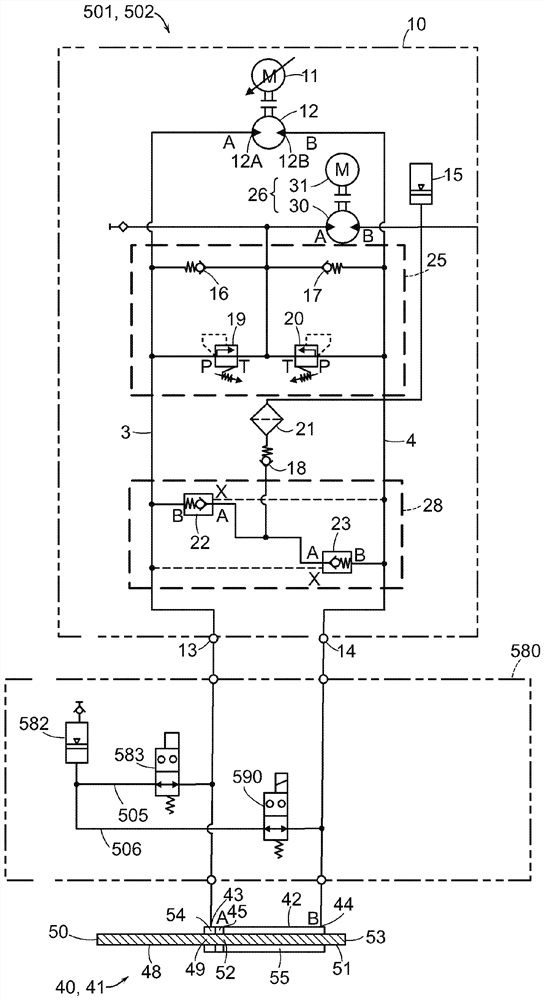
[0042] refer to figure 1 , The oscillating hydraulic system 1 includes a hydraulic circuit 2 . The hydraulic circuit 2 includes an actuator 40 that performs work and a prime mover 10 that controls the flow of hydraulic fluid to the actuator 40 . As used herein, the term "hydraulic fluid" refers to the fluid within the hydraulic circuit 2 . In the illustrated embodiment, the hydraulic fluid is oil, but is not limited thereto. The hydraulic circuit 2 also includes a recovery device 80 disposed between the prime mover 10 and the actuator 40 in the hydraulic circuit 2 . The recovery device 80 allows the oscillating hydraulic system 1 to avoid hydraulic locking by allowing the high pressure side of the actuator to decompress immediately before the actuation direction is reversed. Additionally, recovery device 80 allows the hydraulic system to capture (recover) decompression energy for subsequent use by the hydraulic system, as discussed in detail below.
[0043] Prime mover 10 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More