Intelligent red imported fire ant trapping device and method
A red fire ants and intelligent technology, applied in the field of insect hunting, can solve problems such as complex production process, inconvenient operation of bait or lure, and counting error, so as to reduce data transmission flow, reduce data transmission cost, and flexible operation mode Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
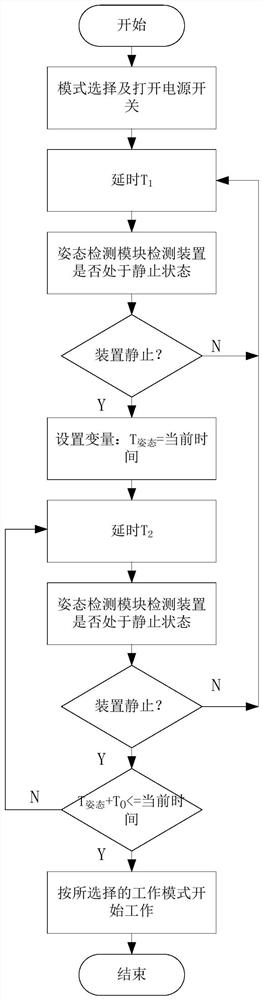
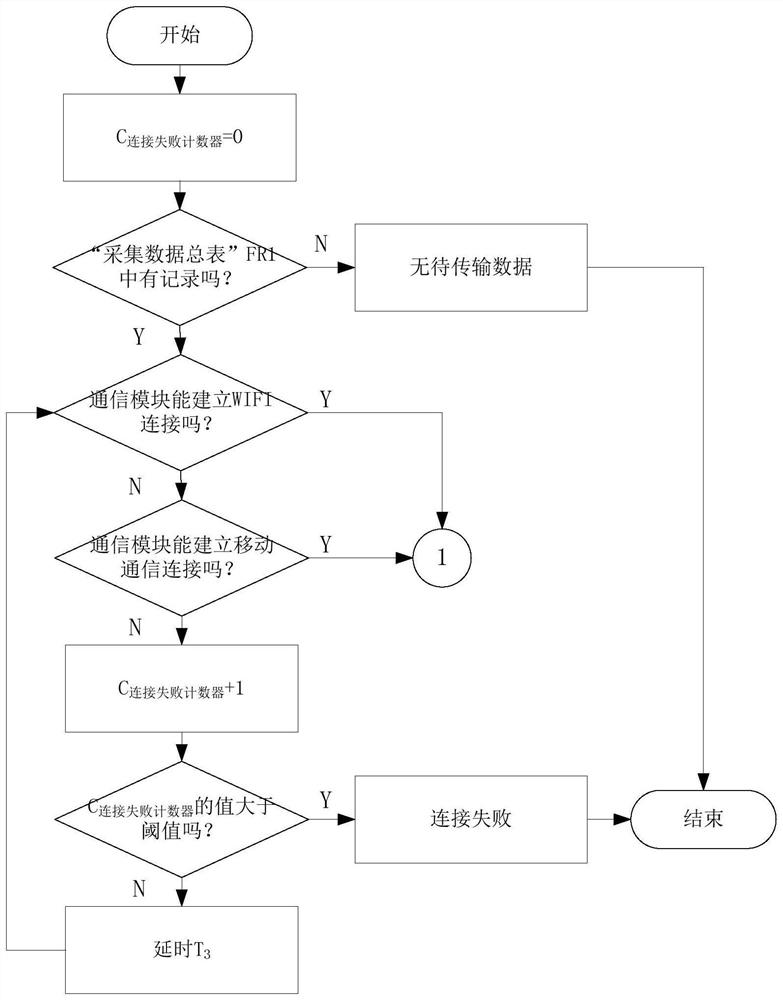
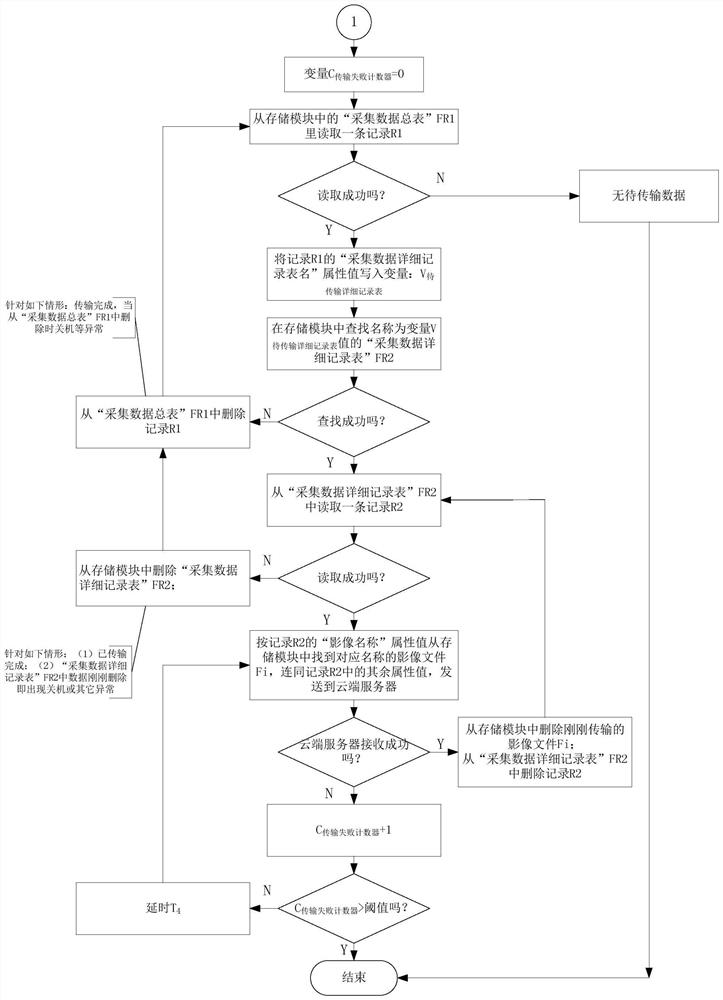
[0109] like Figure 1-8 Shown: a working method of the intelligent trapping device for red imported fire ants, in which a general table of collected data and zero or more detailed record tables of collected data are dynamically maintained in the storage module. The detailed record table of collected data, the name of the table is named with 12 digits, format: 2-digit year + 2-digit month + 2-digit day + 2-digit hour + 2-digit minute + 2-digit second; attributes: date time, location, temperature and humidity, Illumination, image file name, image type (including two types of environmental image and trap image); the collection data general table, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com