

Mechanical arm accurate path planning method based on man-machine cooperation and visual inspection
A technology for visual inspection and human-machine collaboration, applied in manipulators, program-controlled manipulators, and comprehensive factory control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
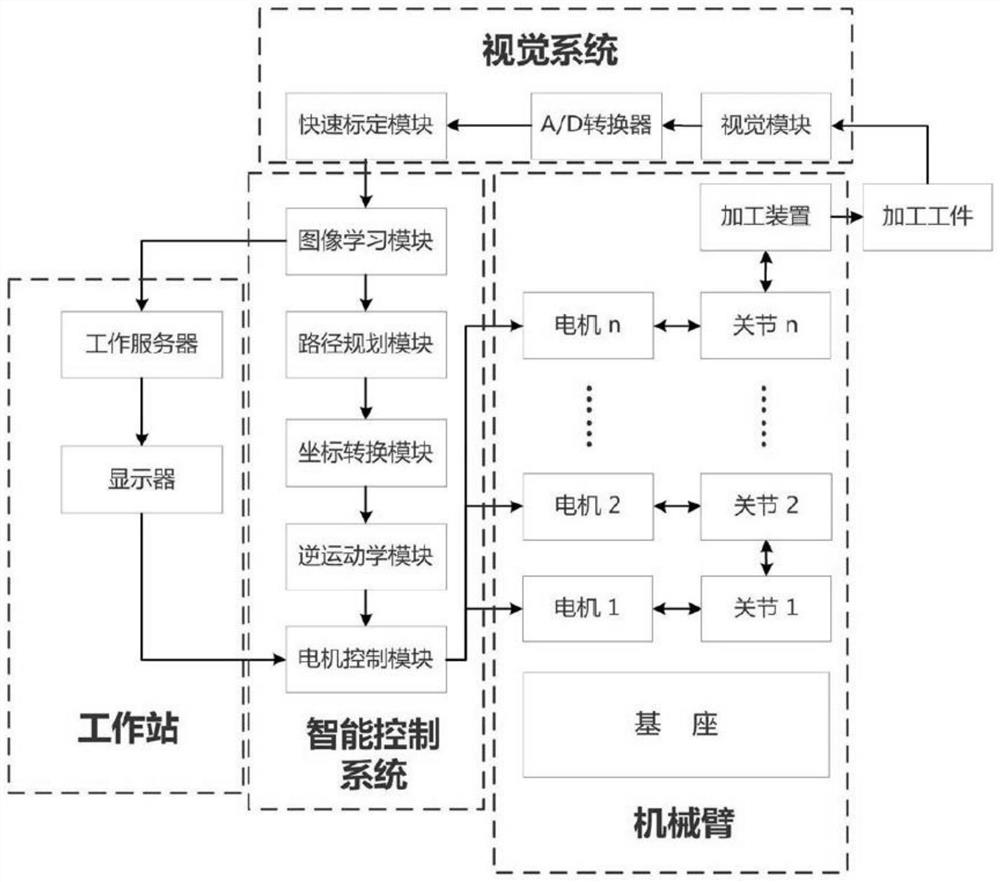
[0050] The hardware part used in the present invention is mainly composed of a mechanical arm, a force sensor, a binocular camera, and a computer. The hardware part composition and connection relationship are as follows: Figure 4 As shown, the actual manipulator used is a 7-DOF Sawyer manipulator, the binocular camera is ZED, and the force sensor model is RobotiqFT300.
[0051] The binocular camera sends the captured image containing the desired path to the computer through the data cable, the force sensor at the end of the robotic arm sends the captured correction force data to the computer through the data cable, and the robotic arm controller sends the current end-effector space to the computer. The coordinates are sent to the computer through WiFi; the computer processes the image and then combines the correction force data and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More