

Robot obstacle avoidance method and system based on multi-sensor fusion estimation and iterative pre-search
A multi-sensor fusion and robot technology, applied in two-dimensional position/channel control, etc., can solve problems such as small value gap, deviation of odometer speed measurement information, robot vibration, etc., achieve optimal path planning, solve planning path deviation, high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
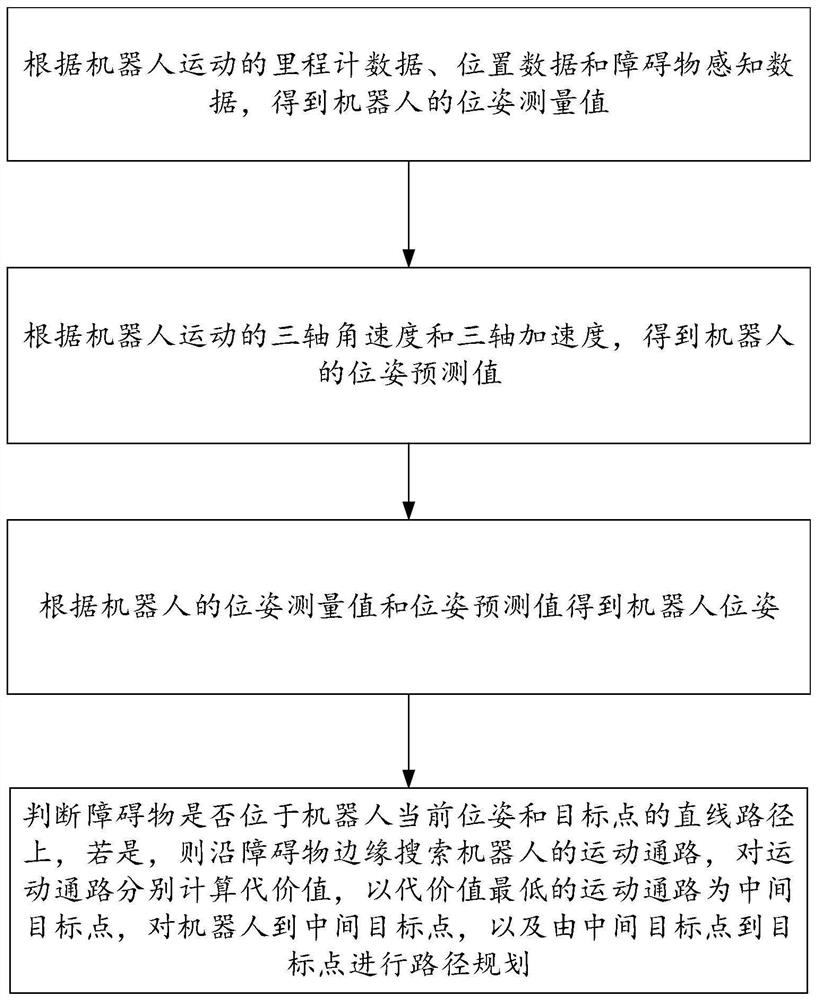
[0042] like figure 1 As shown, this embodiment provides a multi-sensor fusion estimation and iterative pre-search robot obstacle avoidance method, including:
[0043] According to the odometry data, position data and obstacle perception data of the robot motion, the pose measurement value of the robot is obtained;
[0044] According to the three-axis angular velocity and three-axis acceleration of the robot motion, the predicted value of the robot's pose is obtained;
[0045] The robot pose is obtained according to the pose measurement value and the pose prediction value of the robot;
[0046] Determine whether the obstacle is located on the straight line path between the robot's current pose and the target point. If so, search the robot's motion path along the edge of the obstacle, calculate the cost value of the motion path, and take the motion path with the lowest cost value as the intermediate target point. Perform path planning for the robot to the intermediate target p...
Embodiment 2
[0109] This embodiment provides a multi-sensor fusion estimation and iterative pre-search robot obstacle avoidance system, including:
[0110] The pose measurement module is configured to obtain the pose measurement value of the robot according to the odometry data, position data and obstacle perception data of the robot motion;
[0111] The pose prediction module is configured to obtain the pose prediction value of the robot according to the three-axis angular velocity and the three-axis acceleration of the robot motion;
[0112] The pose determination module is configured to obtain the robot pose according to the pose measurement value and the pose prediction value of the robot;
[0113] The path planning module is configured to determine whether the obstacle is located on the straight path of the robot's current pose and the target point, and if so, search the robot's motion path along the edge of the obstacle, and calculate the cost value for the motion path respectively, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More