

Efficient long-distance dredging method for buried culvert and dredging system thereof
A long-distance, high-efficiency technology, applied in waterway systems, buildings, complex mathematical operations, etc., can solve problems such as large fluctuations in dredging conditions, reduced dredging efficiency, equipment damage, etc., to achieve the effect of automatic variable speed adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
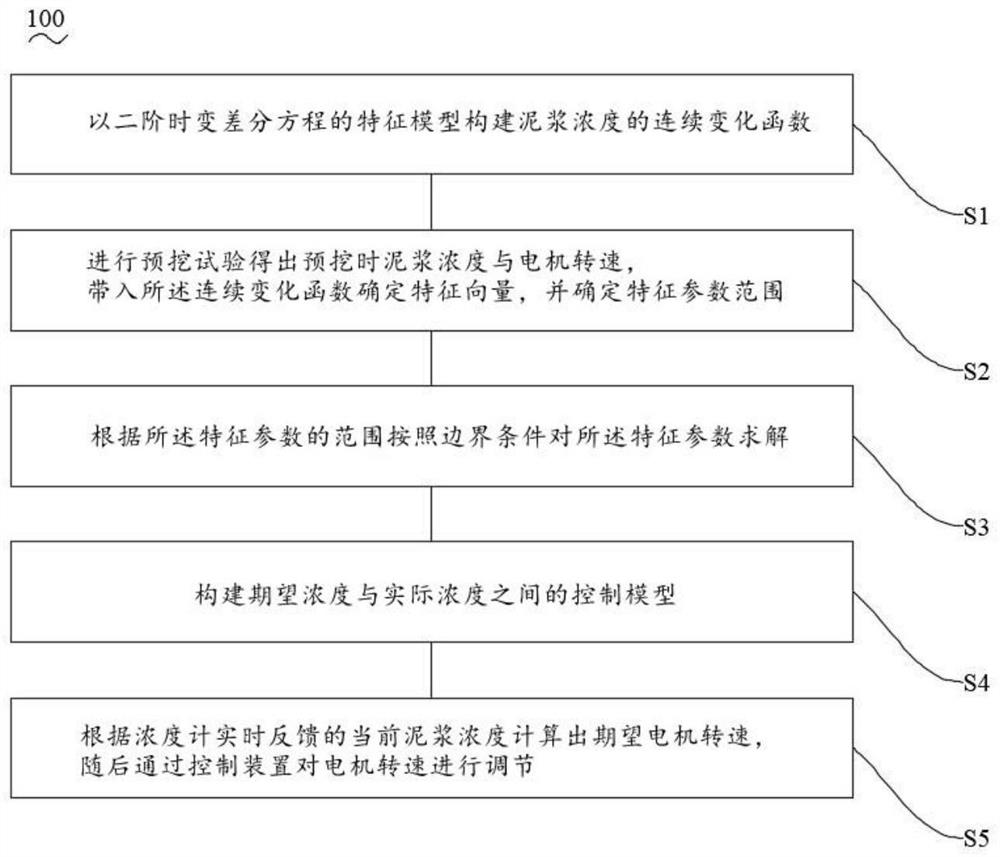
[0063] like figure 1 As shown in the figure, a method for efficient and long-distance dredging of hidden culverts includes the following steps:
[0064] S1. Construct the continuous variation function of mud concentration with the characteristic model of the second-order time-varying difference equation,
[0065] y(k)=f 1 (k)y(k-1)+f 2 (k)y(k-2)+C′g 0 (k)n(k-k 0 ) (1)
[0066] In the formula, y(k) is the mud concentration at time k; y(k-1) is the mud concentration at time k-1; y(k-2) is the mud concentration at time k-2; k 0 is the number of lag steps; n(k-k 0 ) is k-k 0 the rotational speed at the moment; C' is the constraint ratio, and Calculations are performed in subsequent steps.
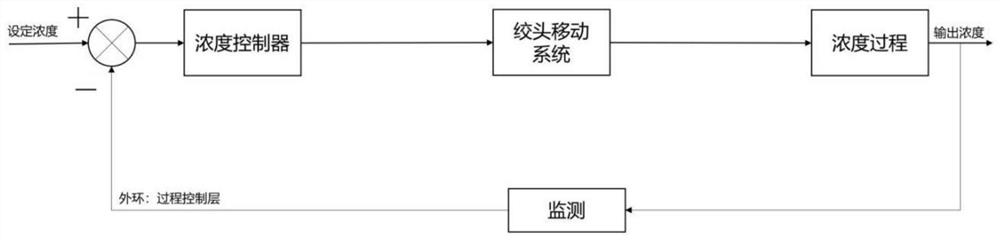
[0067] The high-efficiency long-distance dredging method of the present application adopts an adaptive double closed-loop dredging control structure, and controls the cutting amount of the sludge by adjusting the rotating cutting speed of the stirring member (eg, the twisting head),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More