Highway guardrail vectorization method and device based on vehicle-mounted LIDAR data
A highway and vectorization technology, applied in the field of intelligent transportation, can solve the problems of unavailability, mass introduction, unfavorable point cloud data processing, etc., to reduce redundancy, save storage space, and improve accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
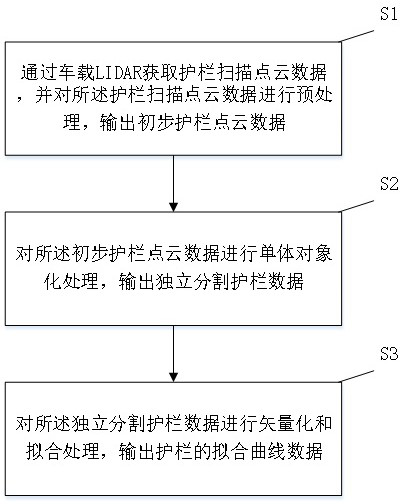
[0082] like figure 1 As shown, a method for extracting highway guardrails based on vehicle LIDAR data includes the following steps:
[0083] S1: Obtain the guardrail scanning point cloud data through the vehicle-mounted LIDAR, preprocess the guardrail scanning point cloud data, and output preliminary guardrail point cloud data; the preprocessing is to use the RandLA-Net algorithm to scan the guardrail point cloud data Perform semantic segmentation and extract preliminary guardrail point cloud data;
[0084] S2: Perform single objectization processing on the preliminary guardrail point cloud data, and output accurate and independently segmented guardrail data; the single objectization includes normalization, rough segmentation, and fine segmentation;
[0085] S3: Perform vectorization and fitting processing on the independently segmented guardrail data, and output the fitting curve data of the guardrail; the vectorization includes center point extraction and center point thinn...
Embodiment 2
[0087] This embodiment is a detailed description of the method described in Embodiment 1, including:
[0088] S1: Obtain the guardrail scanning point cloud data through the vehicle-mounted LIDAR, preprocess the guardrail scanning point cloud data, and output preliminary guardrail point cloud data.
[0089] Use vehicle-mounted LIDAR to obtain massive highway scene point cloud data, covering a variety of highway asset elements, mainly including: pavement, signage, guardrail, vegetation, etc. All kinds of elements are interlaced and closely connected, and it is impossible to effectively distinguish different elements. , the overall clustering extraction of the guardrail point cloud is required to provide a reliable data basis for the independent segmentation of the guardrail point cloud and the trajectory curve fitting. Therefore, the data preprocessing is mainly the semantic segmentation of guardrail point clouds. The experimental results show that RandLA-Net has shown very good...
Embodiment 3
[0149] This embodiment is a specific experimental example using the method described in Embodiment 2. The experiment uses three sets of data sets of different road section environments to verify and analyze the method proposed in this patent. Image 6 As shown, the three sets of data contain typical highway scenes: curve scenes (such as Image 6 a), complex ramp scenarios (such as Image 6 b) as well as straight-line scenarios (such as Image 6 c and Image 6 d). For these three sets of data, the method of this patent is used to verify the data and judge the accuracy.
[0150] The experimental results are as Figure 7 As shown, it can be seen that the method proposed in this patent is aimed at the curve ( Figure 7 a) and the ramp area ( Figure 7 b) has certain advantages, and the effect of single guardrail is significant; while for straight sections ( Figure 7 c and d), the boundaries between the guardrails are clear, although the data of each guardrail is missing, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More