

Airborne liDAR point cloud semantic segmentation method, electronic equipment and storage medium
A semantic segmentation and point cloud technology, applied in the field of remote sensing image processing, can solve the problems of low classification accuracy of small-scale targets, difficulty in improving classification accuracy, and reduced algorithm classification accuracy, etc., to enhance scale perception and enhance geometric characteristics Understanding and Improving the Effect of Semantic Connotation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] The technical solutions in the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work fall within the protection scope of the present invention.
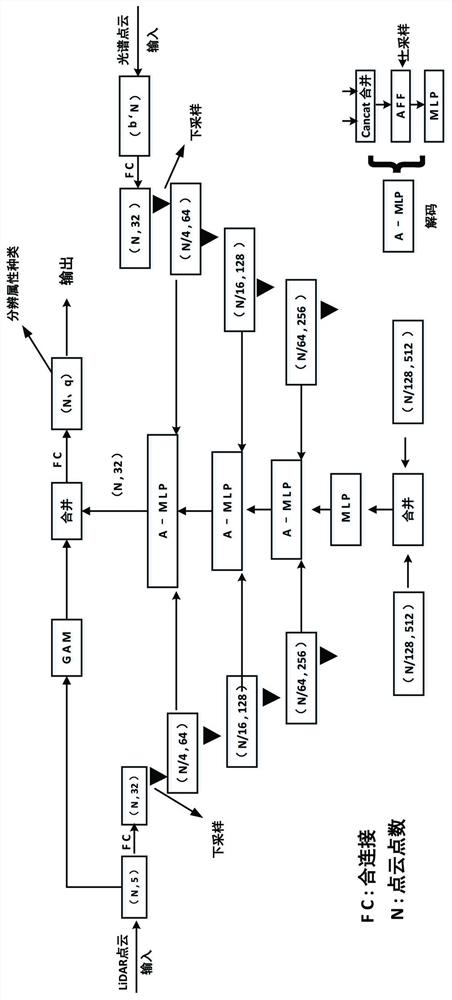
[0059] An airborne LiDAR point cloud semantic segmentation method provided by the embodiment of the present invention first obtains LiDAR point cloud data and hyperspectral data from an airborne platform; then uses the hyperspectral image as a reference coordinate to project the LiDAR point cloud to the hyperspectral image On the image (that is, coordinate alignment), and back-project the hyperspectral data to the LiDAR point cloud through the projection relatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More