

Arc welding robot control platform with visual welding seam automatic tracing function
An automatic tracking and control platform technology, applied in arc welding equipment, manipulators, manufacturing tools, etc., can solve problems such as imperfection, lack of openness, inability to meet the requirements of robot identification and problem solving, and achieve the goal of improving production efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
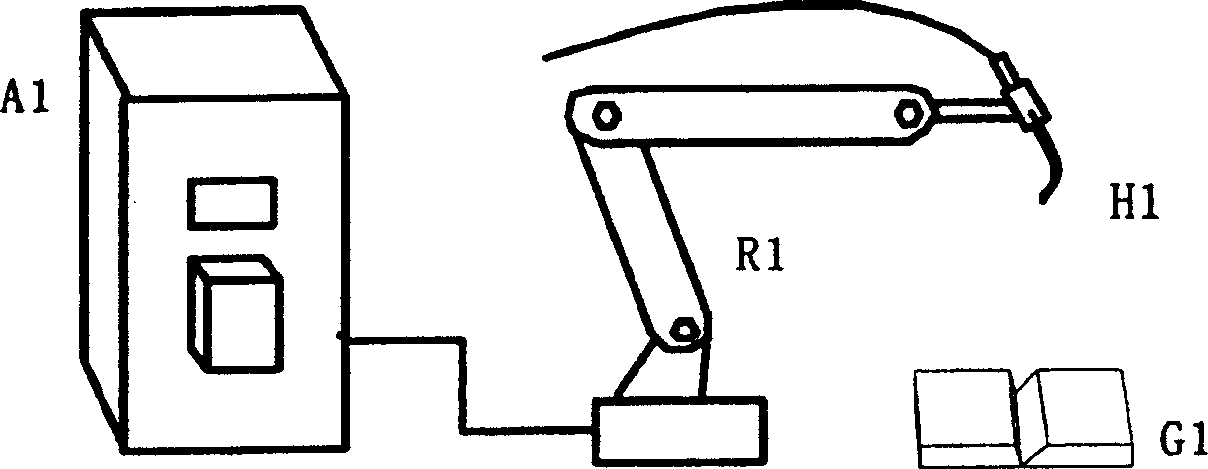
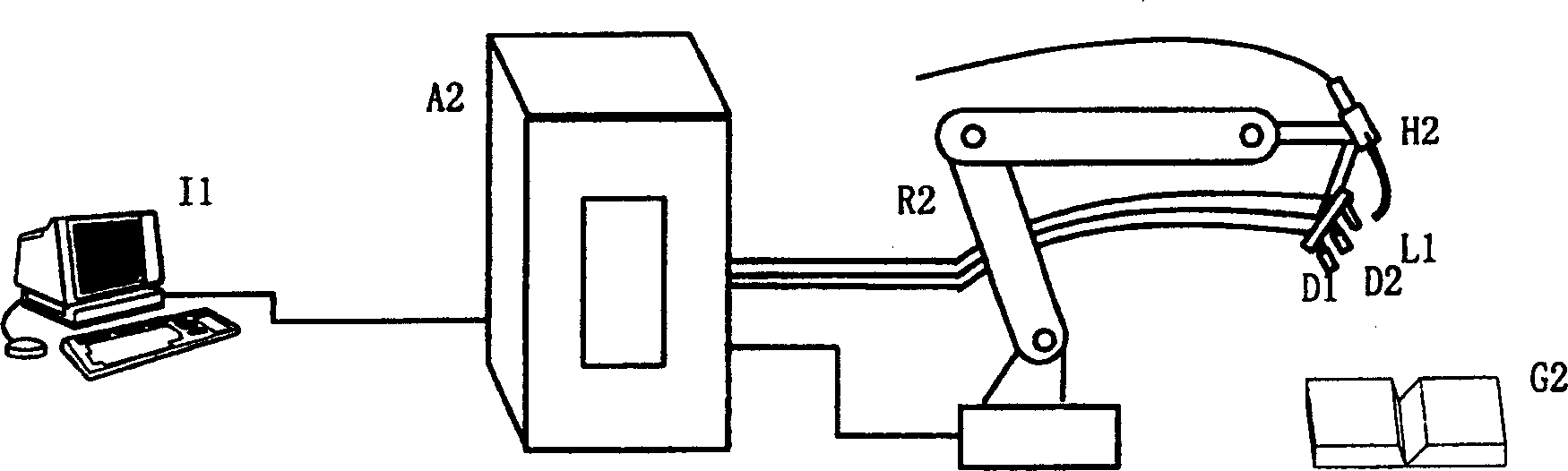
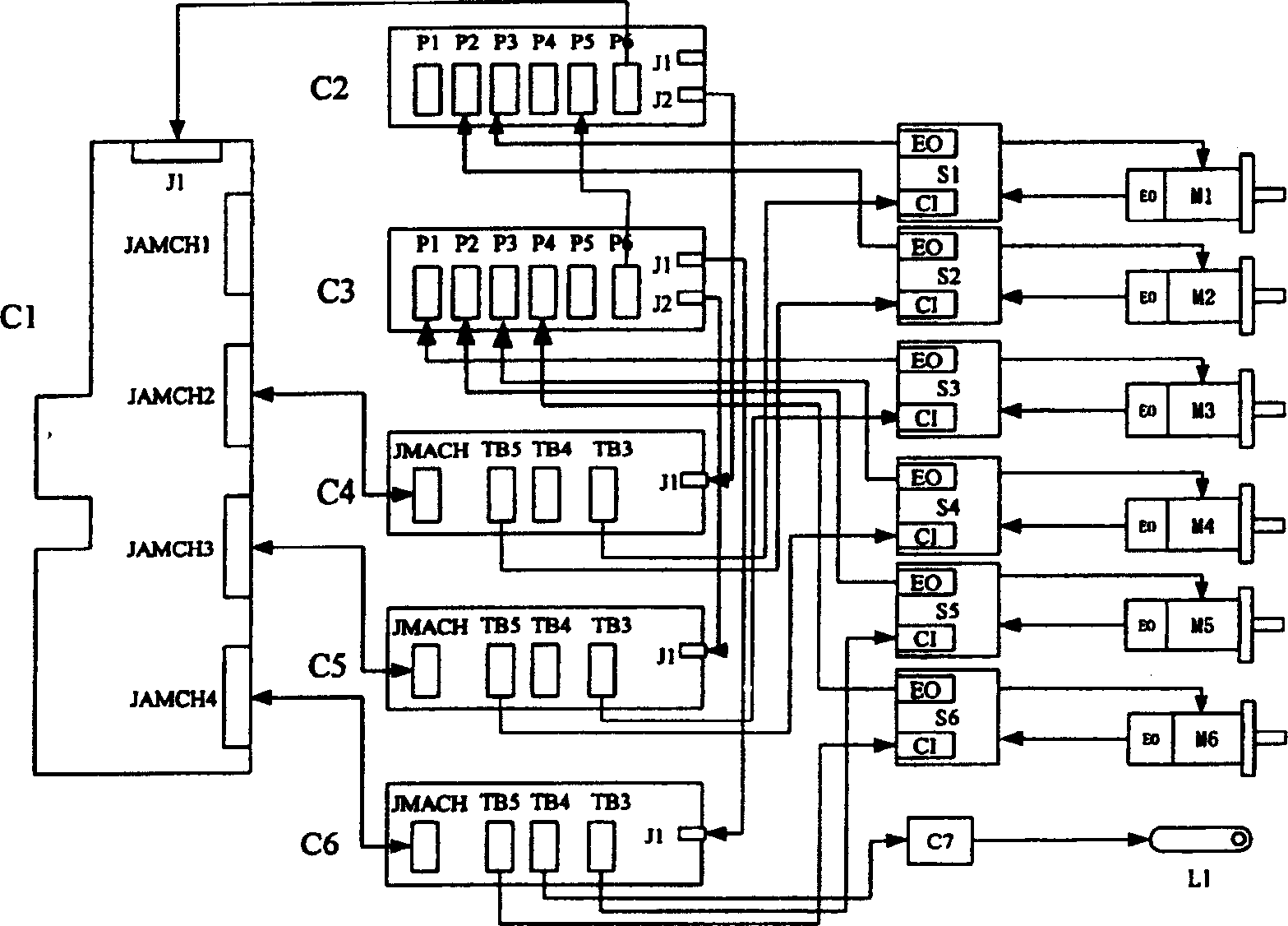
[0029] The control platform through image 3 The circuit shown realizes the control of the robot's AC servo motor and adjustable laser. In the embodiment, an arc welding robot vision platform with visual welding seam automatic tracking function consisting of an industrial robot, an open industrial robot controller, two CCD cameras, a video acquisition card and a laser is built . The industrial computer can use ADVANTECH-610, and the Yaskawa YASKAWA MOTOMAN SK10 robot body can be used as the control object. The servo package adopts the Japanese Yaskawa YASKAWACACR-SR15SZ1SD-Y214 single-axis drive servo package, which is used to drive the S, L, U, R of the robot. , B and T six joints, the camera adopts SONY Digital Hyper HAD color camera (additional filter can be added), the video acquisition card adopts PCI bus OK-C80 / M acquisition card, and the laser adopts semiconductor laser (additional optical filter) .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More