

Micro robot and its in vitro guiding system
A micro-robot, guidance system technology, applied in surgical robots, pipeline systems, sensors, etc., can solve problems such as poor attitude control and movement flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
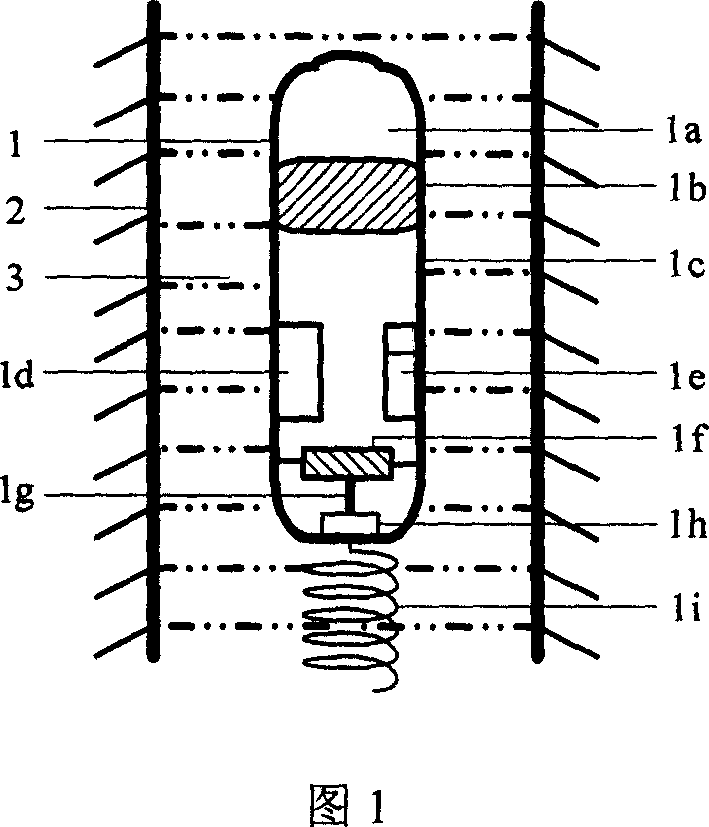
[0052]The internal structure of the micro-robot 1 is shown in Figure 1. Its front end is smooth, and its outer wall has no protrusions or grooves. There is a spiral groove on the outer peripheral surface of the permanent magnet block 1b, which is airtightly matched with the spiral groove at the inner front end of the fuselage 1a. The tail rotating mechanism 1h is fixedly connected with the tail 1i through a rotating rod protruding from the inside of the fuselage. The tail rotating mechanism 1h is composed of a worm 1g, a worm gear, a cam, a rotating rod, a bottom plate, a hinge, a permanent magnet and an electromagnetic coil. The worm 1g is installed on the main shaft of the micromotor 1f. The worm wheel and the cam are coaxially arranged, and the rotating shaft of the worm wheel is installed on the bottom plate. , the bottom plate is pasted o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More