

High subdivided integration type stepper motor driver
A stepping motor, integrated technology, used in motor generator control, electrical components, control systems, etc., can solve the problems of low frequency oscillation, low step angle resolution of stepping motor, out of step, etc., to eliminate low frequency Effects of oscillation, reduced design cost, and reduced velocity error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
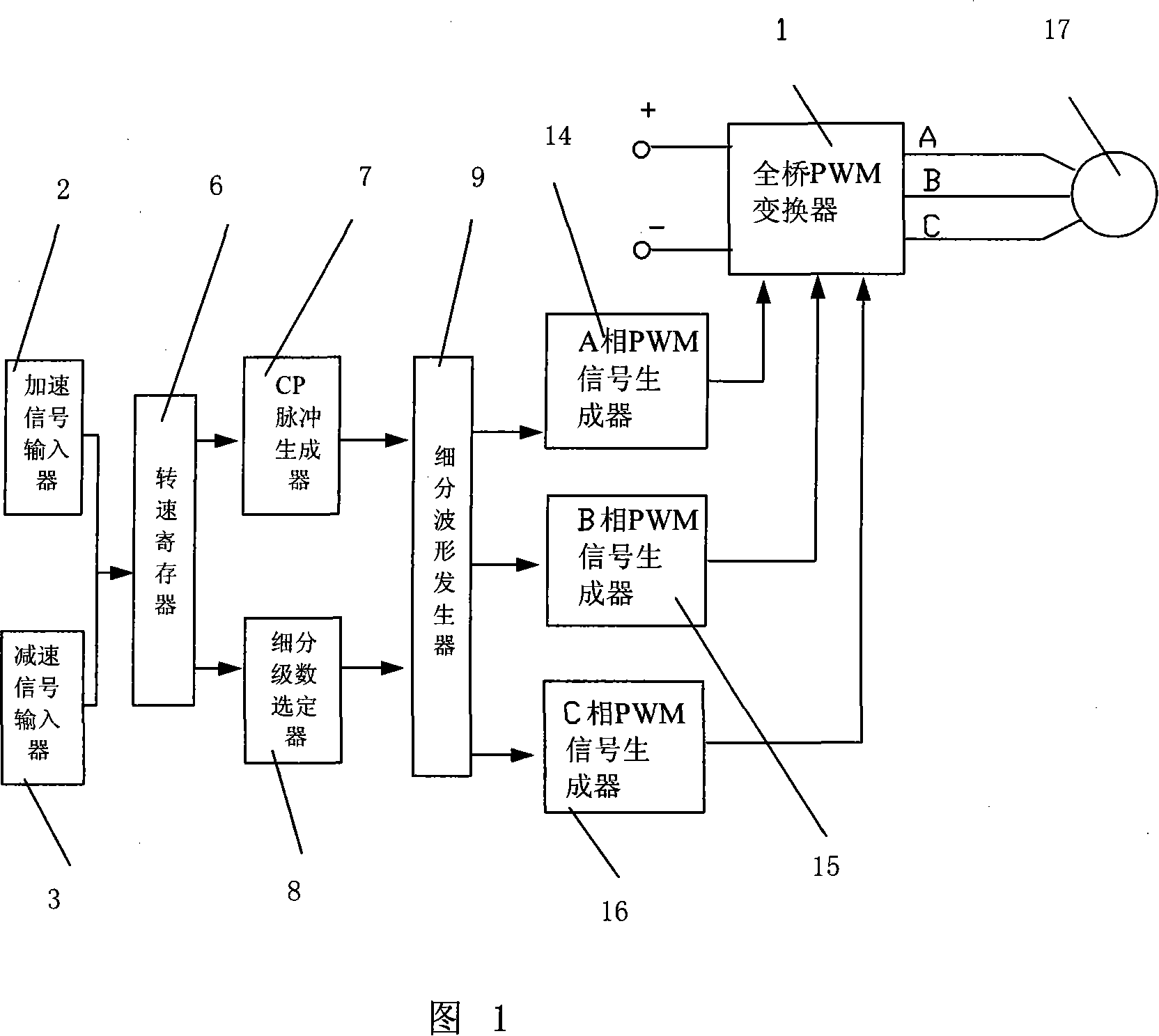
[0007] Specific Embodiment 1: The present embodiment will be specifically described below with reference to FIG. 1 . This embodiment consists of a full-bridge PWM converter 1, an acceleration signal input device 2, a deceleration signal input device 3, a rotational speed register 6, a CP pulse generator 7, a subdivision series selector 8, a subdivision waveform generator 9, and a Phase PWM signal generator 14, B phase PWM signal generator 15 and C phase PWM signal generator 16, the input end of speed register 6 connects the output end of acceleration signal input device 2 and deceleration signal input device 3 to realize by adding or subtracting Digital to select the output speed of the motor. One output end of the speed register 6 is connected to the input end of the CP pulse generator 7 to select the CP pulse frequency and output the CP pulse through the speed. The other output end of the speed register 6 is connected to the subdivision The number selector 8 selects the subd...
specific Embodiment approach 2
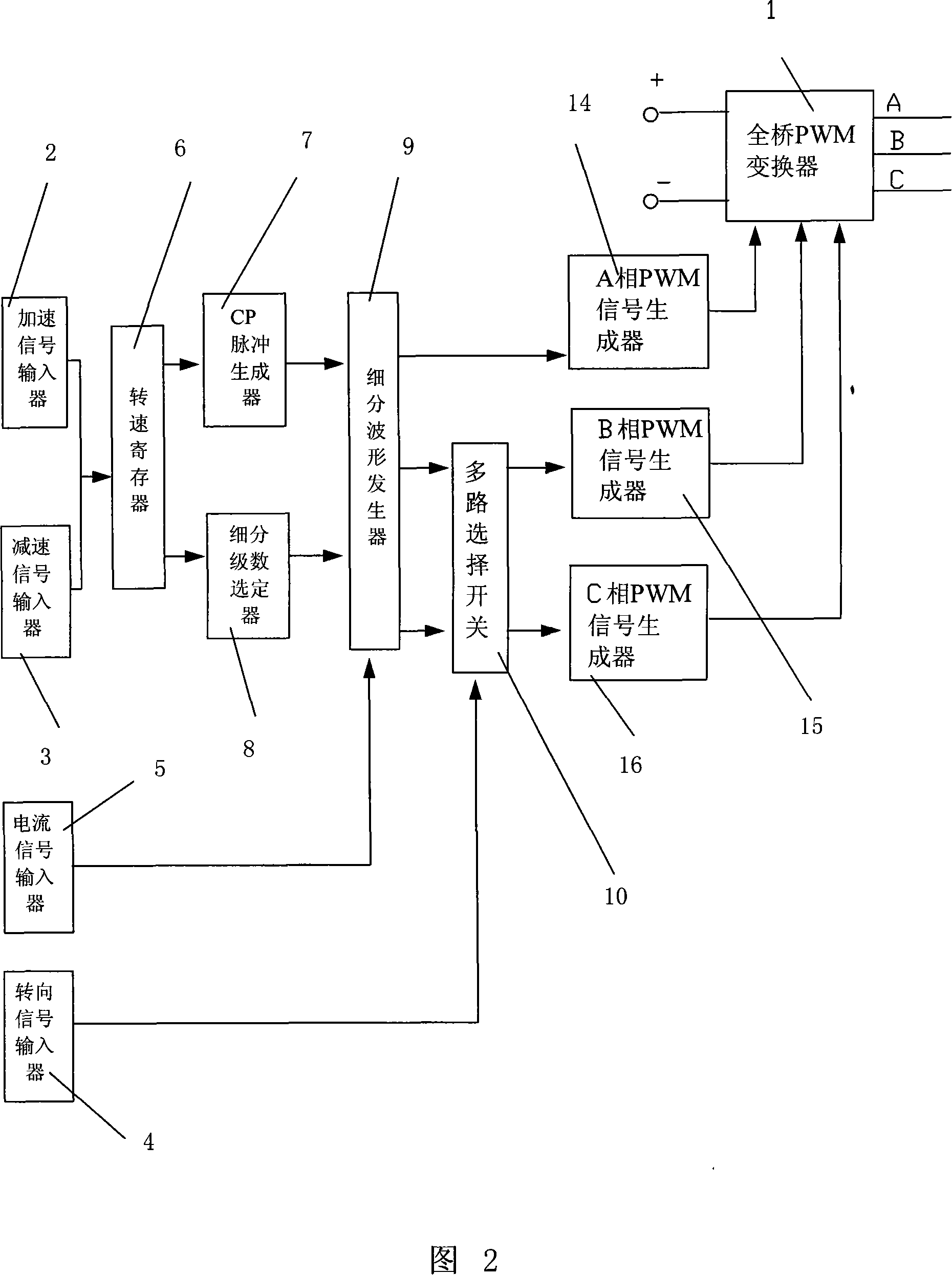
[0009] Specific Embodiment 2: The present embodiment will be specifically described below with reference to FIG. 2 . The difference between this embodiment and embodiment one is that it also includes a turn signal input device 4, a multiplexer switch 10 and a current signal input device 5, and the output end of the current signal input device 5 is connected to another subdivision waveform generator 9. The input terminal is to realize the adjustment to the motor phase current sinusoidal waveform amplitude in the subdivision waveform generator 9, and the output terminal of the steering signal input device 4 is connected to the control end of the multi-way selector switch 10, and the multi-way selector switch 10 is arranged on from the subdivision Waveform generator 9 to any two output channels on the three output channels between A-phase PWM signal generator 10, B-phase PWM signal generator 11 and C-phase PWM signal generator 12 to realize the completion of the motor by changing ...
specific Embodiment approach 3
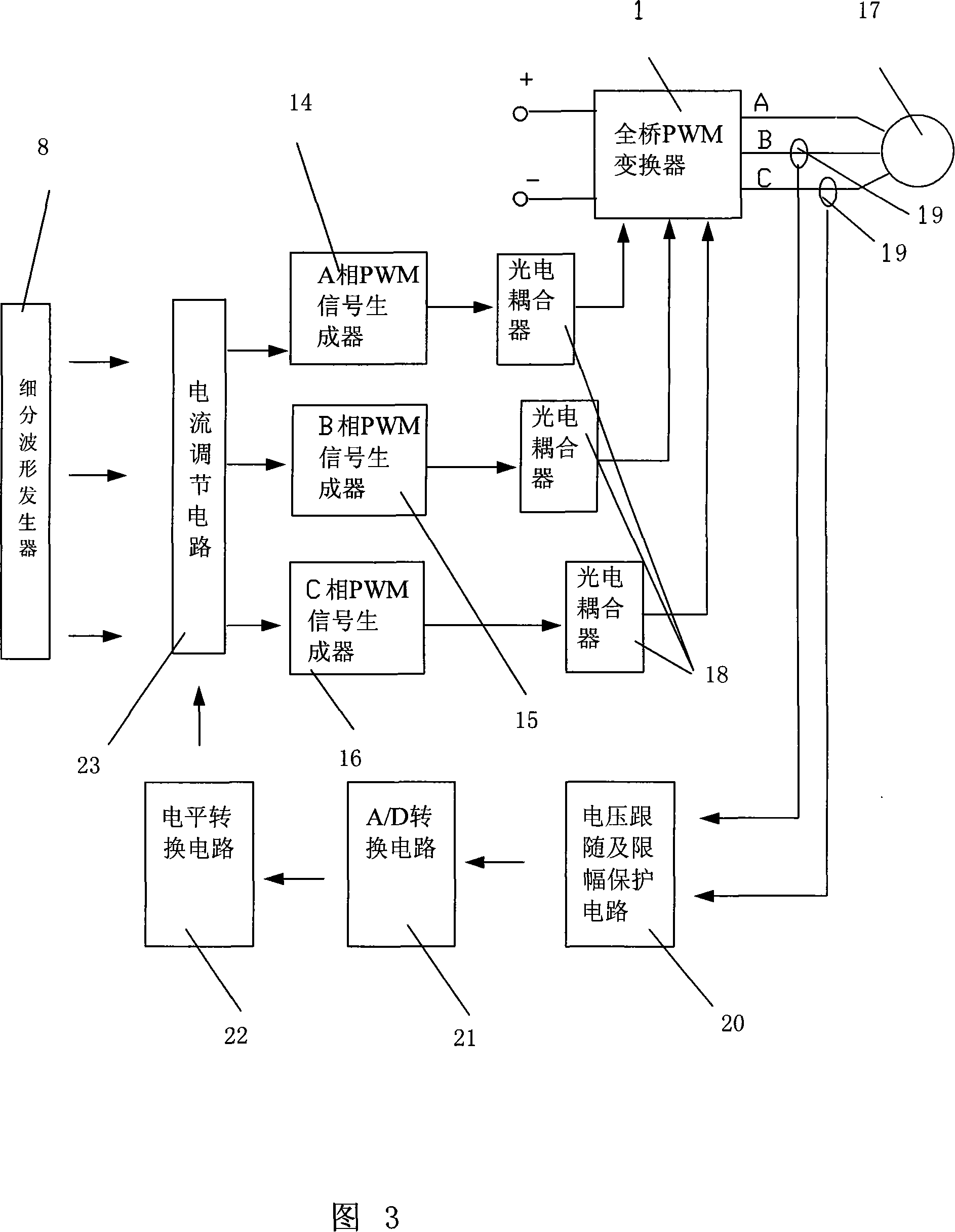
[0011] Specific Embodiment Three: The present embodiment will be specifically described below in conjunction with FIG. 3 . The difference between this embodiment and Embodiment 1 is that it also includes three photocouplers 18, and the three photocouplers 18 are respectively arranged in the A-phase PWM signal generator 14, the B-phase PWM signal generator 15 and the C-phase PWM signal generator. Between the output terminal of the generator 16 and the control terminal of the full-bridge PWM converter 1 . This embodiment electrically isolates the control circuit (low-voltage side) from the main circuit (high-voltage side), and solves the electromagnetic interference received by the control part of the stepper motor driver. The output is the main channel for the interference source to enter the system. The control system uses weak current to control strong current. When the control object is running, strong electromagnetic interference is often generated. If the output port is no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More