

Manipulator of automatic positioning and rapid grasping pipe piece
A self-positioning and fast technology, applied in the direction of manipulator, wellbore lining, tunnel lining, etc., can solve the problems such as limitation of segment posture adjustment, influence of tunnel forming quality, inflexible movement of rotating platform, etc., to achieve high segment assembly efficiency and improve Assembly efficiency and easy posture adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
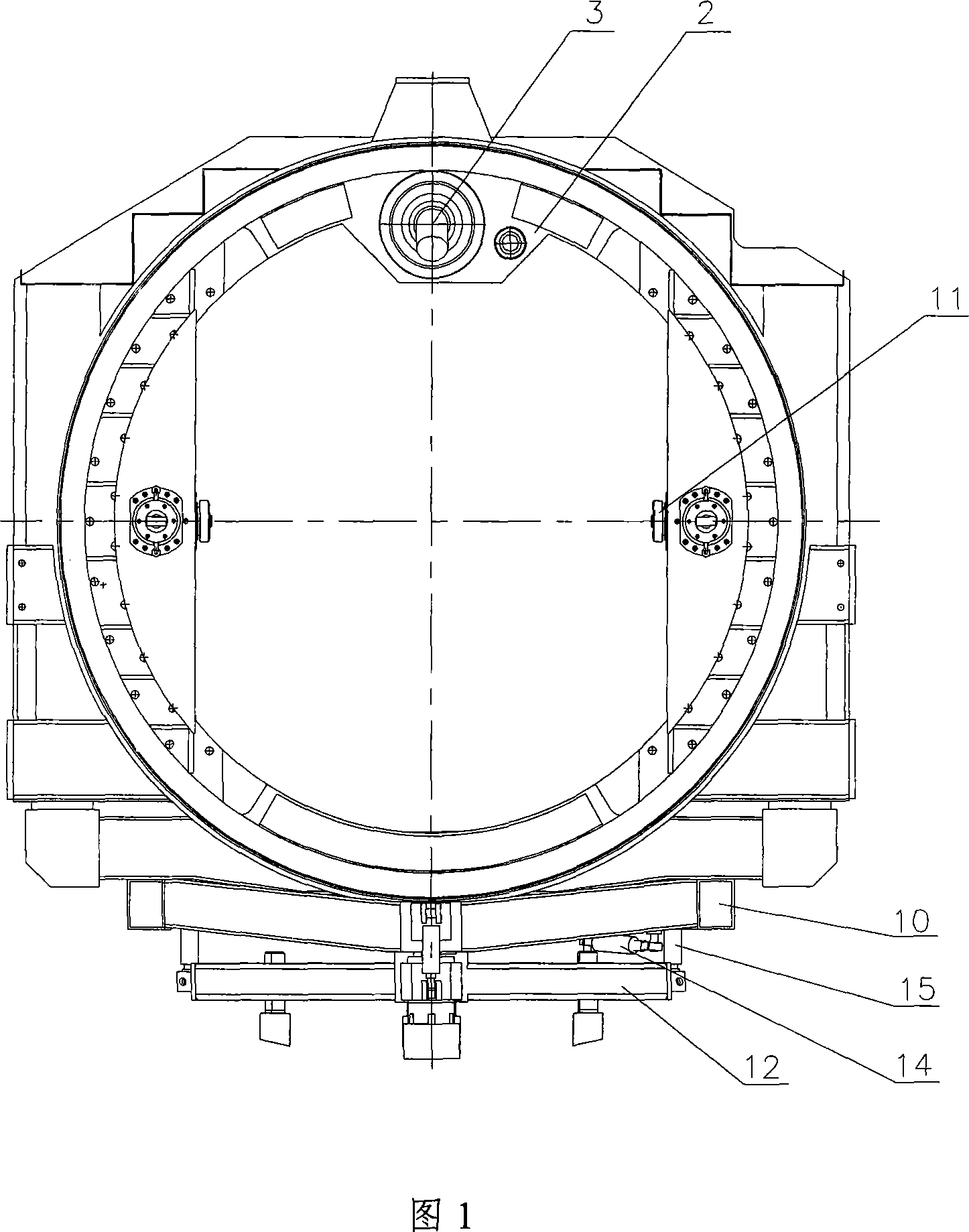
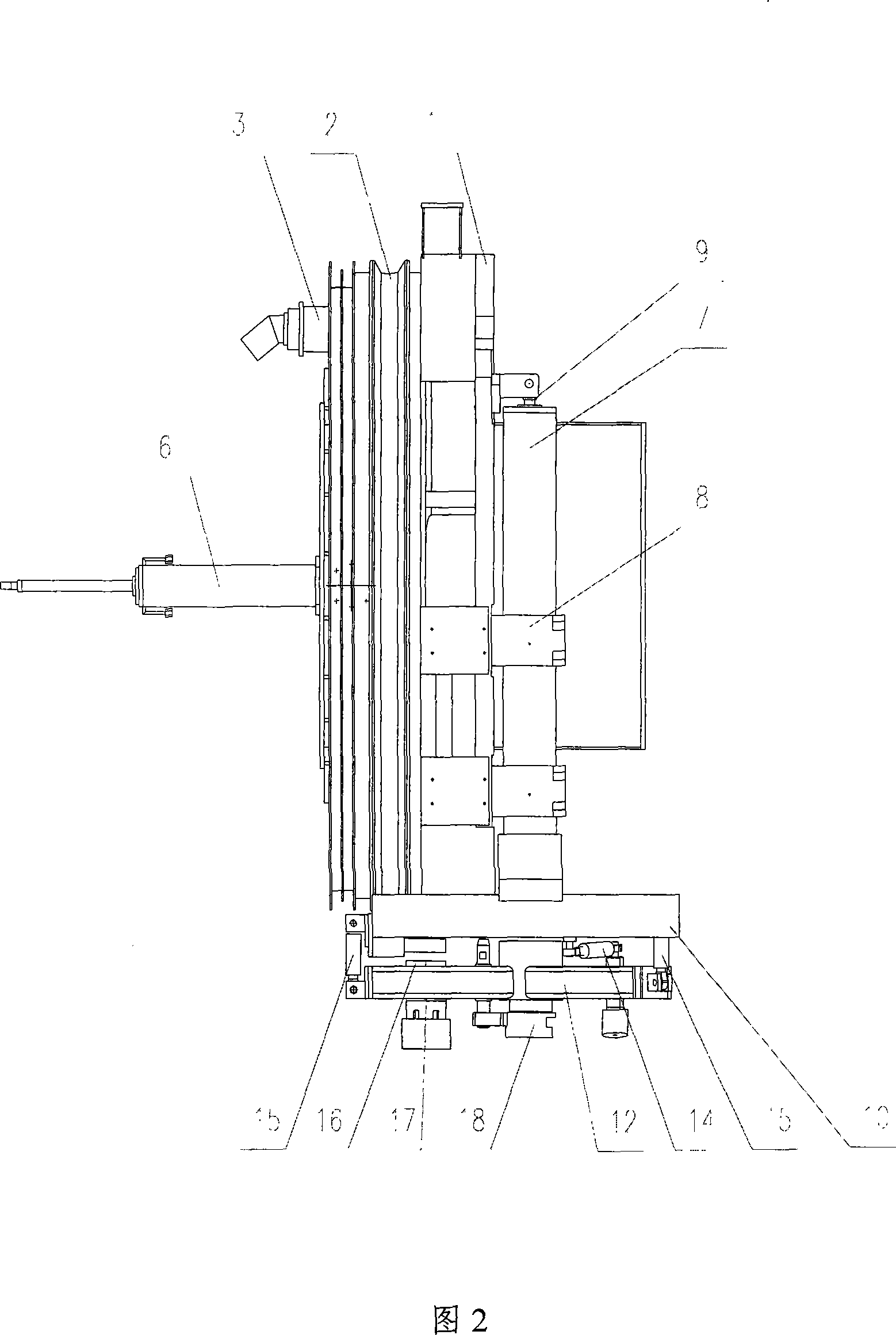
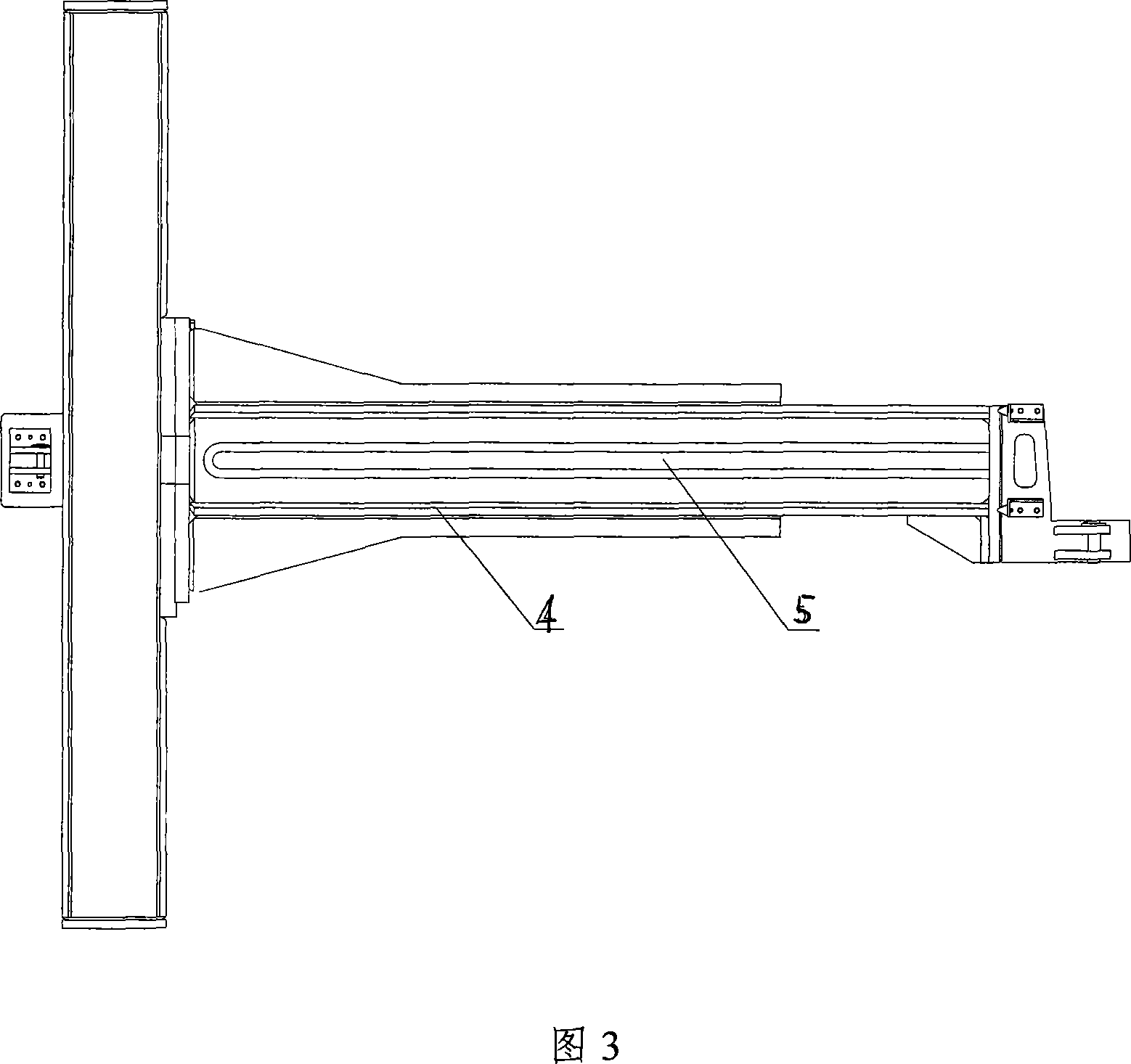
[0012] Referring to the accompanying drawings, the self-positioning and fast grabbing segment manipulator, the whole device consists of a rotating ring 1, a fixed ring 2, a driving device 3, a cantilever beam 4, a grooved track 5, two translation cylinders 6, two guide columns 7, and four guide sleeves 8. The second lifting cylinder 9, the lifting frame 10, the four rollers 11, the grasping platform 12, the grasping cylinder 13, the deflection cylinder 14, the three tilting cylinders 15, the positioning rod 16, the joint bearing 17, and the grasping head 18. The axial direction of the tunnel is set as the X axis, the tunnel radial horizontal direction is the Y axis, and the tunnel radial vertical direction is the Z axis; the axes of the rotating ring 1 and the fixed ring 2 coincide with the X axis, and the driving device 3 is fixed on the fixed ring 2. Its hydraulic motor drives the pinion through the reduction box, thereby driving the large ring gear and the rotating ring 1 co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More