

Competing type network robot chess-playing system
A network robot and robot technology, applied in the field of robotics, can solve the problems of transmission delay, remote teleoperated robot games, and the inability to have flexible control methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
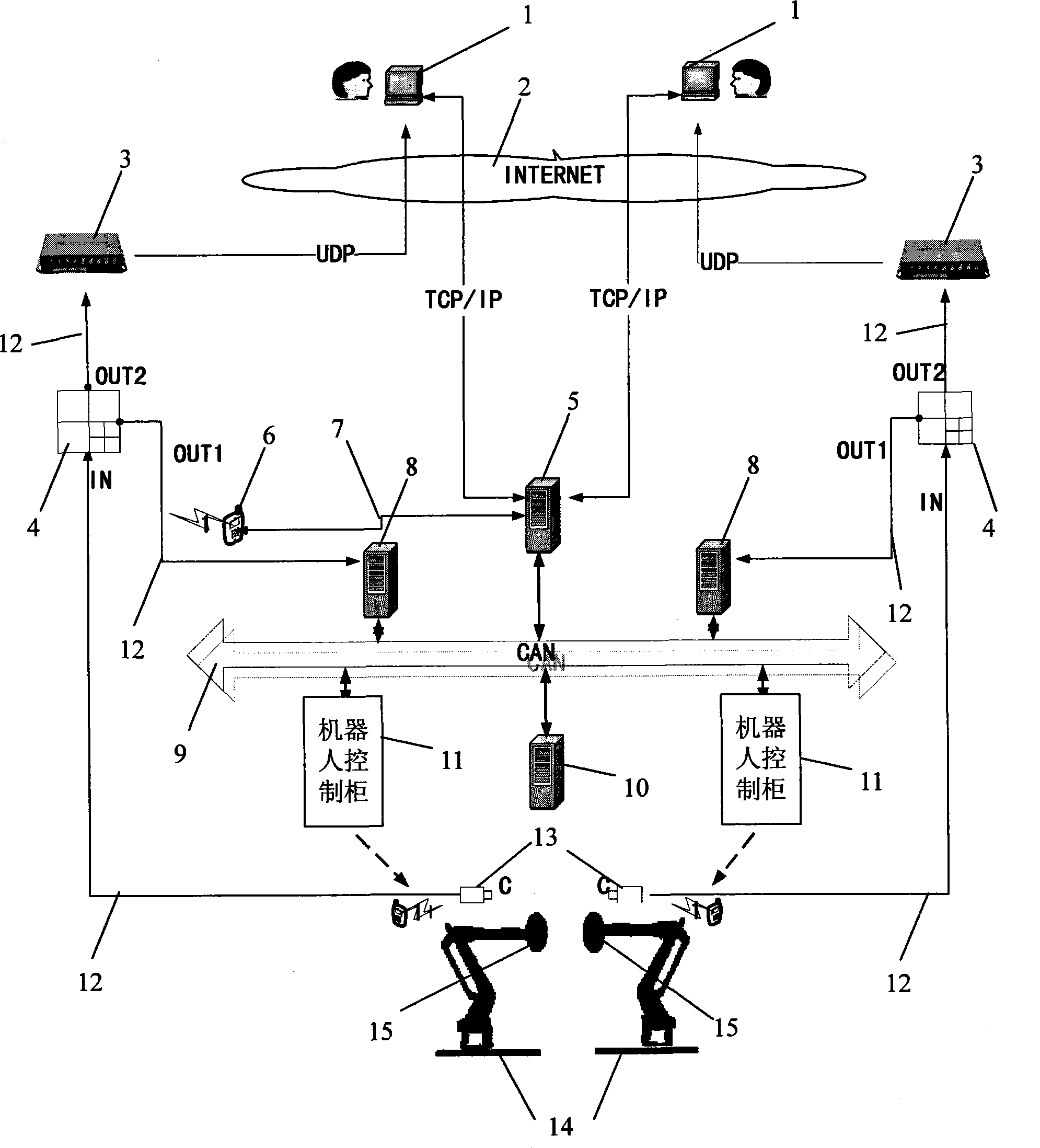
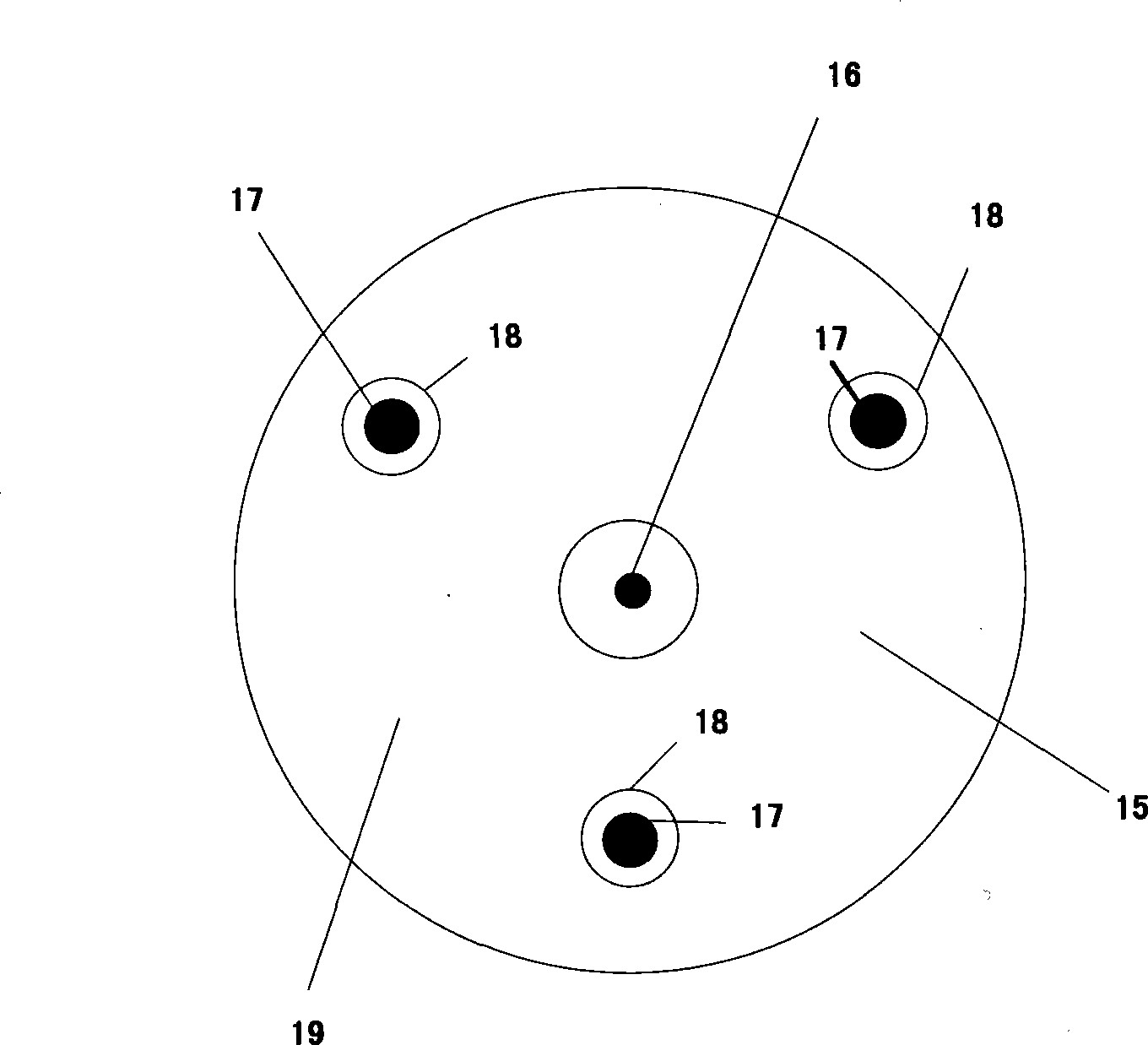
[0089] The invention has been implemented in the intelligent robot laboratory of the Institute of Robot and Information Automation System of Nankai University. The game system is based on two RH6 six-degree-of-freedom industrial robots. Each end effector of the robot hand is vertically equipped with a self-made metal target disk, the specific shape is as attached figure 2 . The target plate is equipped with a laser emitting device, three laser receiving devices and a wireless sensor slave node, which are used to record the robot's game situation, and thus serve as the basis for judging the outcome of the game. A CCD camera is horizontally fixed on each target plate as a real-time monitoring feedback of the playing environment. The system also includes an integrated control platform, including a communication server, two vision servers and a robot controller. Through the integrated control platform, it is possible to use the mouse, keyboard or gamepad to perform game operati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More