

Welding manipulator
A welding manipulator and articulation technology, applied in manipulators, program-controlled manipulators, welding equipment, etc., can solve the problems of low production efficiency of manual welding, affecting product manufacturing quality, and high labor intensity of workers, achieving light weight, low cost, welding Stable quality effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
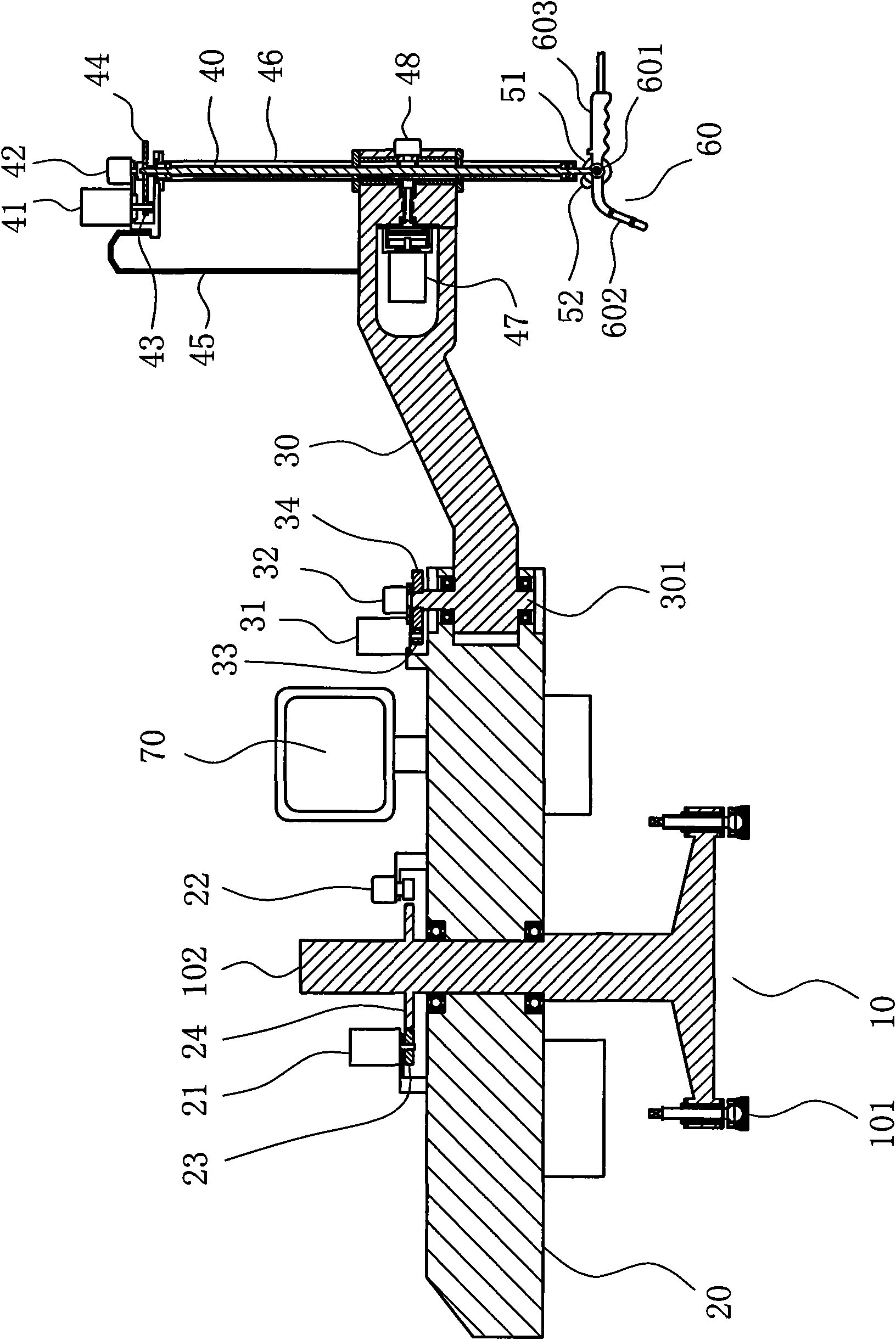
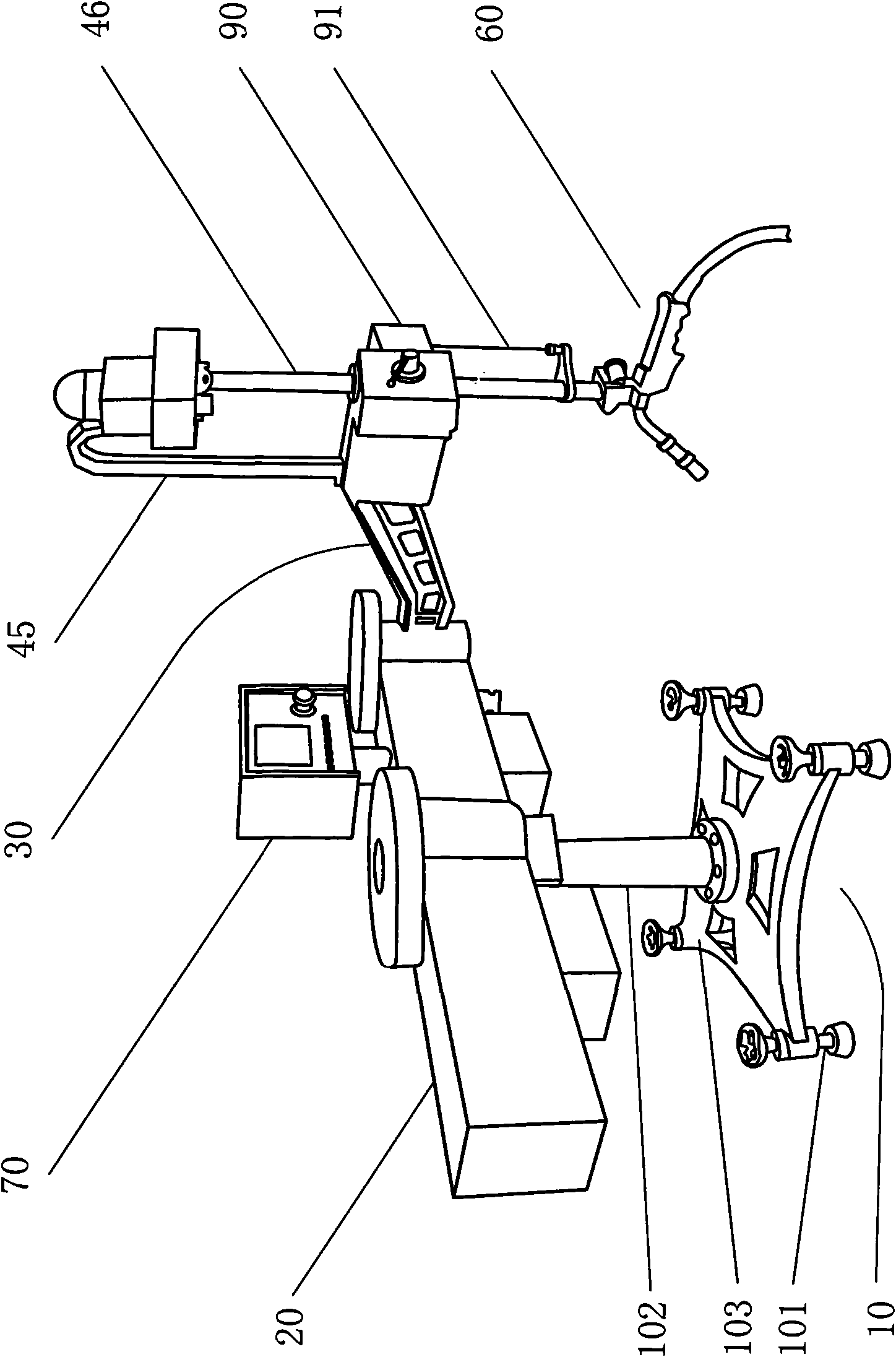
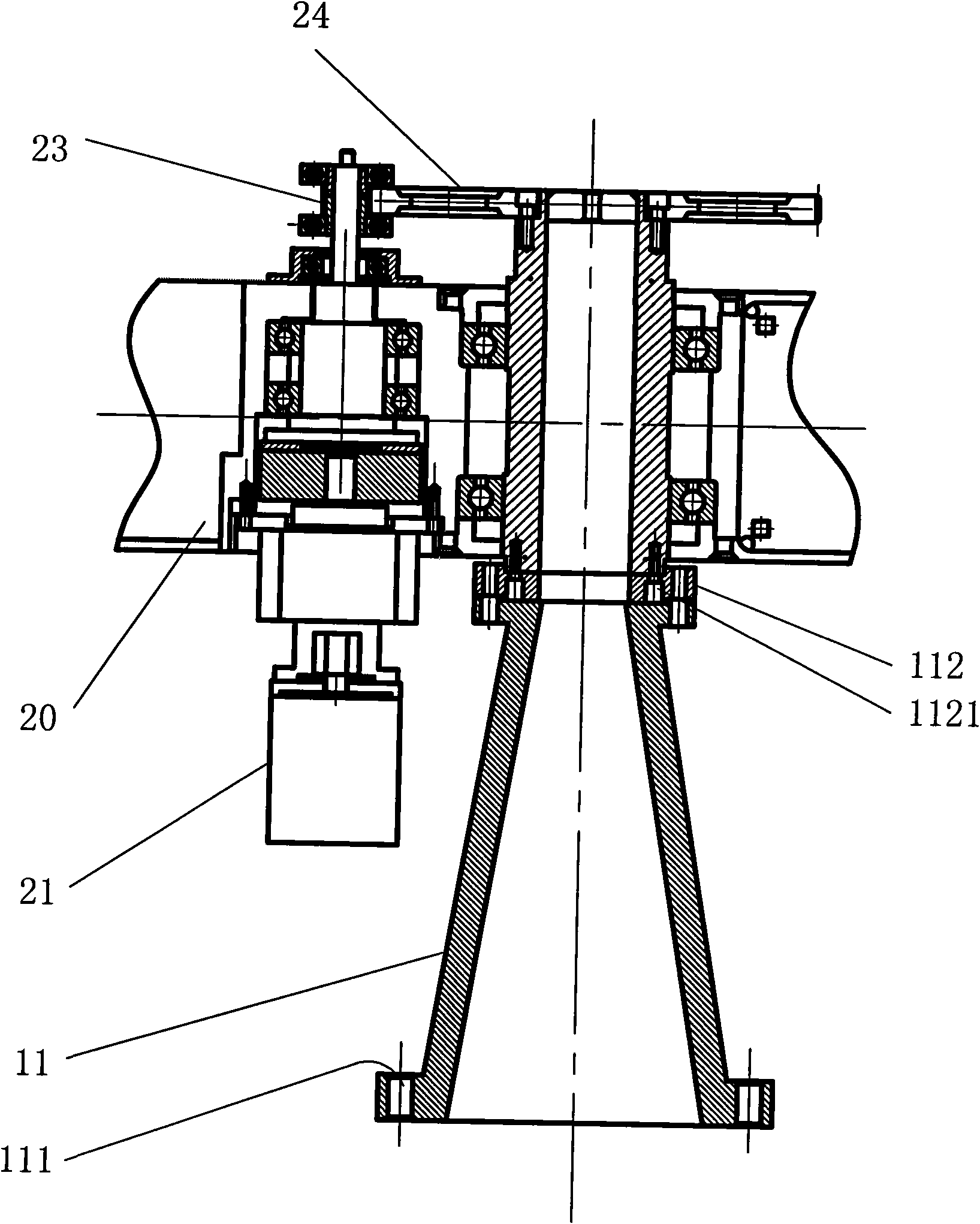
[0022] The present invention will be further described below with specific embodiment, see Figure 1-4 :
[0023] The welding manipulator includes a base 10 and a motor. A vertical shaft 102 is provided on the base 10. A large rocker arm 20 that can rotate around it is provided on the vertical shaft 102. One end of the large rocker arm 20 is hinged to a The small rocker arm 30 is provided with a vertical shaft 40 at the outer end of the small rocker arm 30, an outer shaft 46 is arranged outside the vertical shaft 40, and a welding torch head 60 is hinged at the lower end of the vertical shaft 40. The large rocker arm 20 and the small rocker arm 30 The rotation of the vertical shaft 40 and the lifting of the vertical shaft 40 are all driven by the motors 21, 31, 41, 47 that are set independently, and are collected or measured by the independent encoders 22, 32, 42, 48. The rotation angle and the lifting displacement signal , the swing of welding torch head 60 is driven by moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More