

Suspension rotor equivalent disturbance current compensation control device for bearing-free permanent magnet synchronous motor
A technology of permanent magnet synchronous motor and suspended rotor, which is applied in the direction of single motor speed/torque control, electronic commutation motor control, control system, etc. Problems such as eccentricity and inability to meet the needs of disturbance observation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
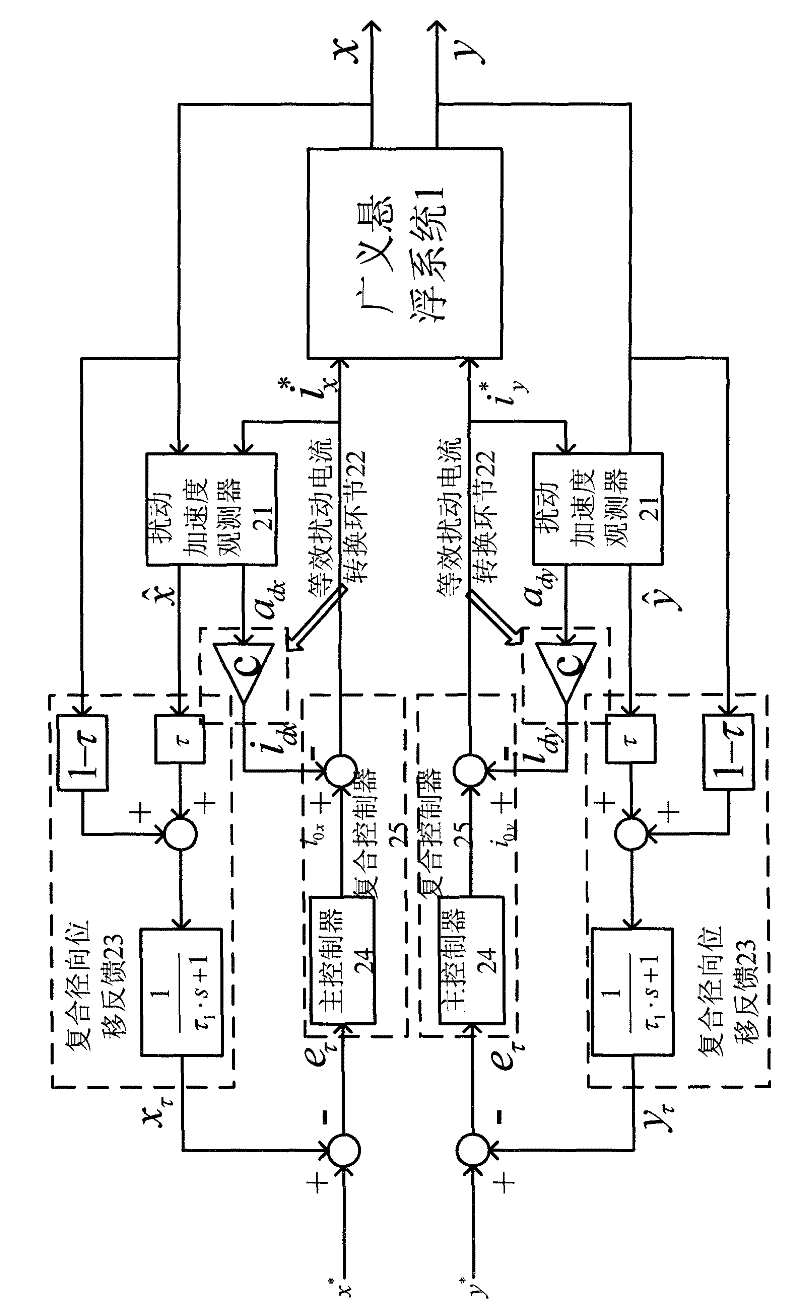
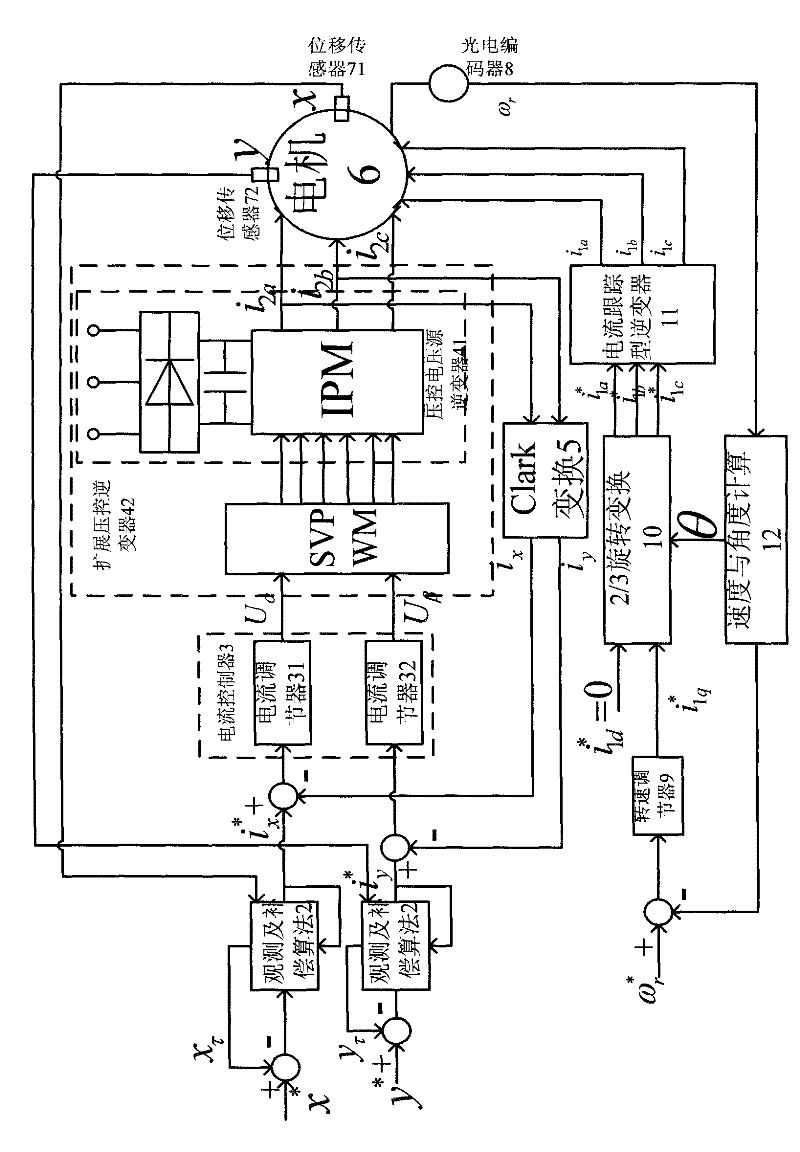
[0045] A bearingless permanent magnet synchronous motor suspension rotor equivalent disturbance current compensation control device, see figure 1 , figure 2 and Figure 3. figure 2 Among them, photoelectric encoder 8, speed regulator 9, 2 / 3 rotation coordinate transformation 10, current tracking inverter 11, speed and angle calculation 12 and motor 6 form an alternating pole bearingless permanent magnet synchronous motor torque control system. The control device includes a generalized suspension system 1 and a disturbance observation and compensation algorithm 2. The two observation and compensation algorithms 2 are connected in series before the generalized suspension system 1 and form a closed-loop structure; it is used for motor suspension in the displacement ring of a bearingless permanent magnet synchronous motor. The system takes control.
[0046] In this embodiment: the extended voltage-controlled inverter 42 is formed by the voltage-controlled voltage source inverte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More