

Carrier smoothing code pseudorange technology-based dynamic attitude positioning method
A code pseudo-range and smoothing technology, which is applied in the field of satellite orientation and attitude determination, can solve the problems of lack of rank in observation equations, large amount of calculation, unfavorable engineering applications, etc., and achieve the goal of overcoming the decline in success rate, solving the problem of lack of rank, and improving the success rate Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Before introducing the present invention, it is better to introduce the relevant conditions or relevant knowledge, such as the prerequisites for the realization of the present invention.
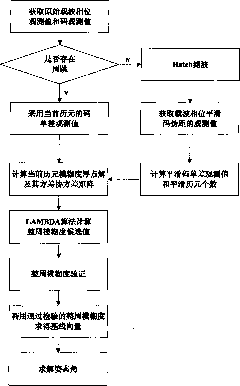
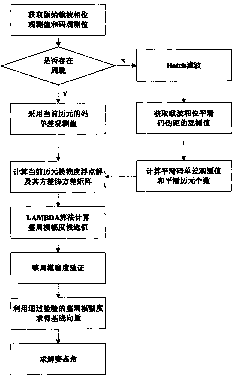
[0022] like figure 1 Shown, the concrete realization process of the present invention is as follows:
[0023] (1) Use the triple difference method to detect whether there is a cycle slip in the current epoch, if not, use the Hatch filter to obtain the smoothed code observation, and record the smoothing window length k; if there is, use the code observation of the current epoch quantity;
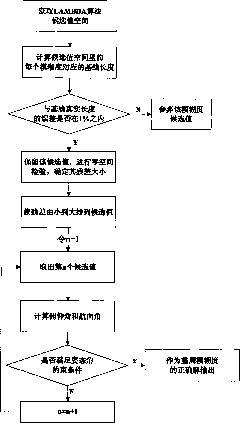
[0024] Let δφ be the three-difference carrier phase measurement value of two adjacent epochs, δρ be the three-difference value of the geometric distance from the two antennas to the satellite, which can be roughly calculated according to the motion state of the carrier, and δε be the triple-difference noise item (centimeter level Below), λ is the carrier wavelength, ε C is the preset threshold, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More