

Method for observing rotary speed of induction motor of Kalman filter with index fading factor
A technology of Kalman filter and induction motor, which is applied in the direction of electronically commutated motor control, generator control, motor generator control, etc. It can solve the problems of large noise covariance matrix error and influence on state variable observation results, etc., and achieve dynamic Excellent performance, accelerated convergence speed, and accurate rotational speed observation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0031] Specific Embodiment 1: In this embodiment, the rotational speed observation is realized based on the rotational speed observer, and the Kalman filter is used in the rotational speed observer to perform error prediction. During the operation of the rotational speed observer, the Kalman filter adopts The exponential fading factor λ(k+1) is introduced into the prediction equation of the error covariance matrix, and the prediction equation of the error covariance matrix for:
[0032] P ~ ( k + 1 ) = λ ( k + 1 ) G ( k ) P ^ ( k ) G ( k ) + Q ,
[0033] The expression of λ(k+1) is:
[0034] ...
specific Embodiment approach 2
[0042] Specific implementation mode two: this implementation mode is a further description of implementation mode one,
[0043] The state variable x of the speed observer is:
[0044] x=(i sα , i sβ , ψ rα , ψ rβ , ω r ) T ,
[0045] where i sα is the α-axis component of the stator current, i sβ is the β-axis component of the stator current, ψ rα is the α-axis component of the rotor flux linkage, ψ rβ is the β-axis component of the rotor flux linkage, ω r is the rotor speed;
[0046] Thus, the state equation of the induction motor used by the speed observer in the α-β two-phase stationary coordinate system is:
[0047] d dt i sα = - 1 T sr ′ ...
specific Embodiment approach 3
[0073] Specific implementation mode three: the following combination Figure 1 to Figure 12 Describe this embodiment, this embodiment is a further description of Embodiment 2,
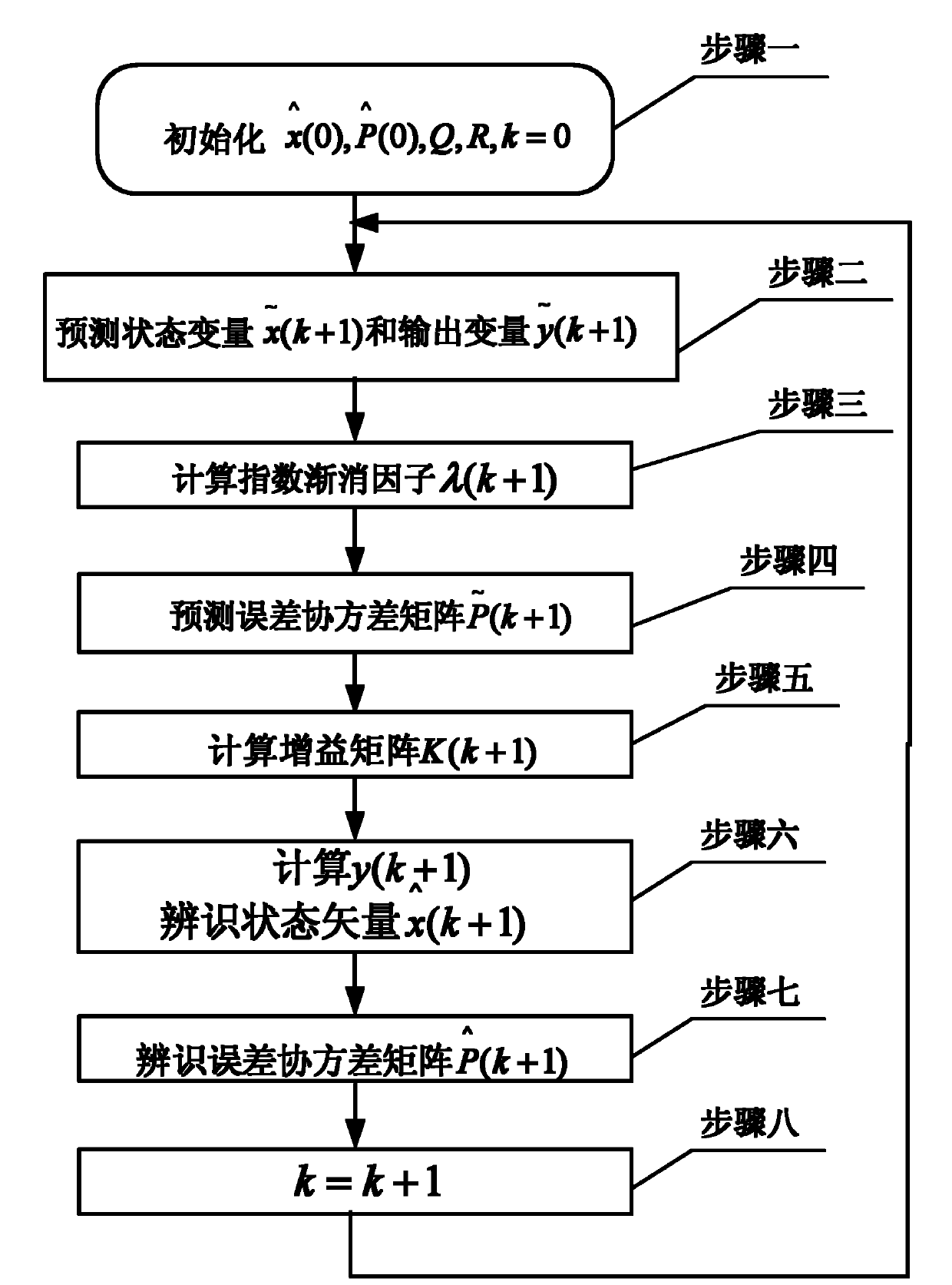
[0074] The specific operation process of the speed observer is:
[0075] Step 1: Initialize the identification value of the state variable x and the identification value of the error covariance matrix ,Make Simultaneously select the initial value of the system noise covariance matrix Q and the initial value of the measurement noise covariance matrix R; and set the sampling period;
[0076] Step 2: Predict state variables and the output variable , the specific process is:
[0077] At the beginning of the k+1th sampling period, use the state identification result of the kth sampling period Calculate and obtain A(k) and G(k), measure the three-phase stator voltage of the induction motor, and then obtain the α-axis of the stator voltage of the k+1th sampling period according to the transform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More