Method for controlling switching operation sequences of full-automatic transformer substation based on mobile robot
A mobile robot, sequence control technology, applied in electrical components, circuit devices, information technology support systems, etc., can solve the inability to interact with the substation sequence control platform, the inability to realize the sequence control process of the switching operation, and the inability to realize the automatic identification of equipment status, etc. problems, to save the time of equipment verification, eliminate the influence of subjective factors, and achieve the effect of small investment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the drawings and embodiments.
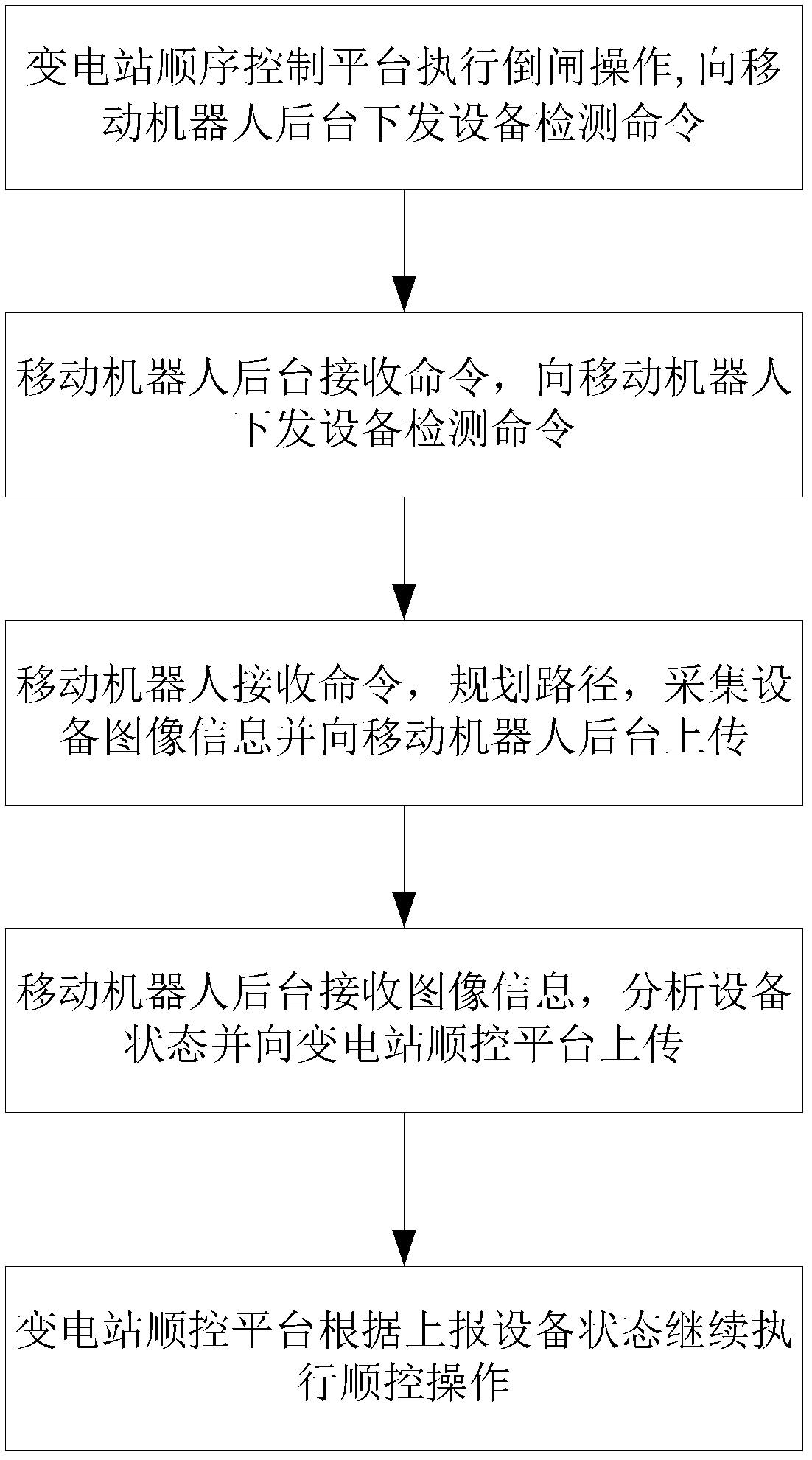
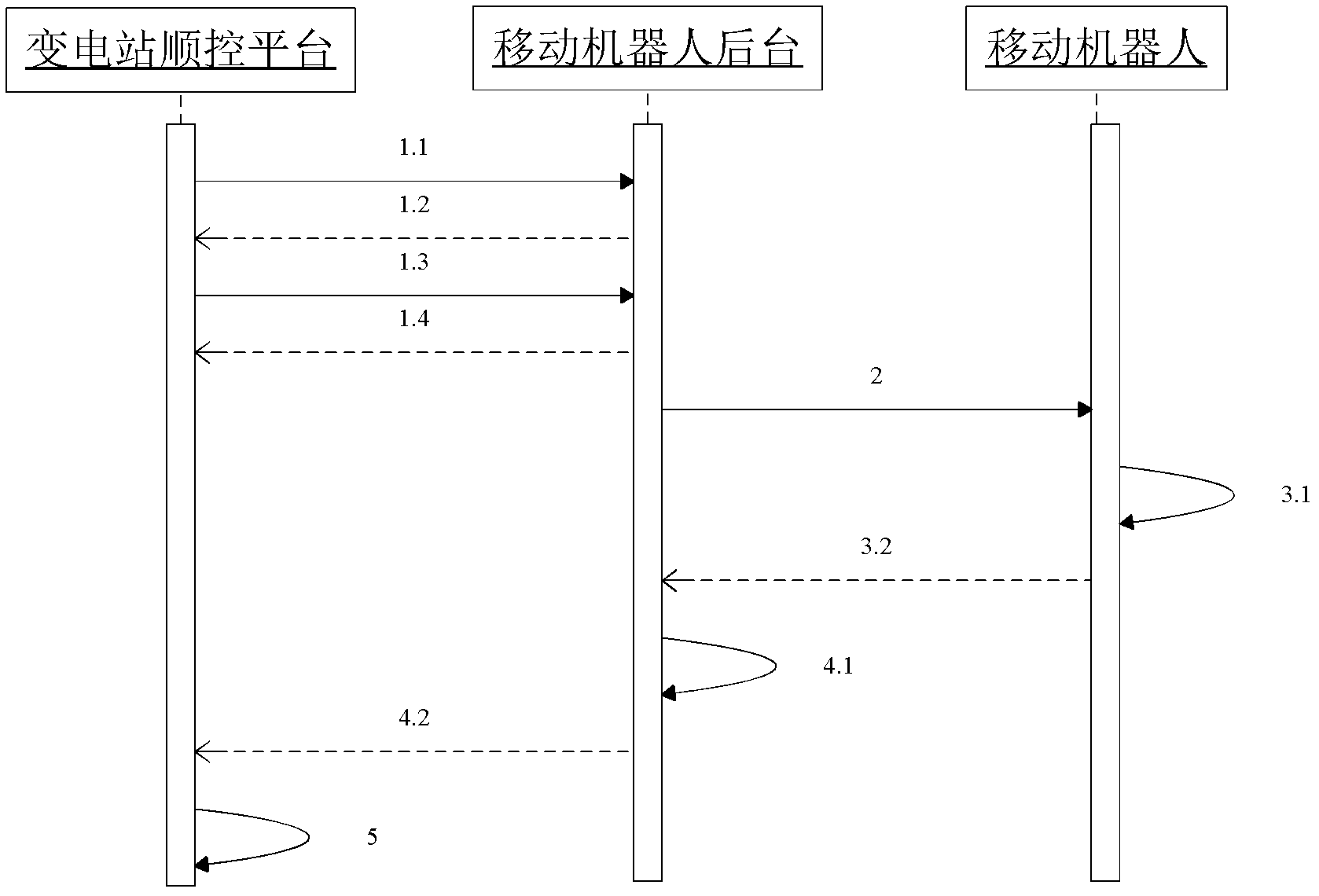
[0027] figure 1 , figure 2 In the present invention, a mobile robot is used to interact with the substation sequence control platform through the IEC61850 protocol, and the optimal path planning algorithm, image analysis, and pattern recognition algorithm are used to realize the automatic detection of the equipment status after the substation switching operation, and the recognition result passes the IEC61850 The protocol is sent to the substation sequence control platform to realize the automatic adjustment of the equipment status after the switching operation, and drive the automatic and smooth execution of the switching operation, and truly realize the one-button sequence control of the switching operation of the substation.
[0028] In order to further reveal the technical solution of the present invention, the embodiments of the present invention are described in c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com