

Micro-vision servo-control micromanipulation robot system
A servo controller, robot system technology, applied in micro manipulators, bioreactors/fermenters for specific purposes, manipulators, etc., can solve the problem of difficult to guarantee accuracy, micro-manipulation tools easily collided and broken, no automatic obstacle avoidance function, etc. problem, to achieve the effect of less cell damage and lower cost of consumables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
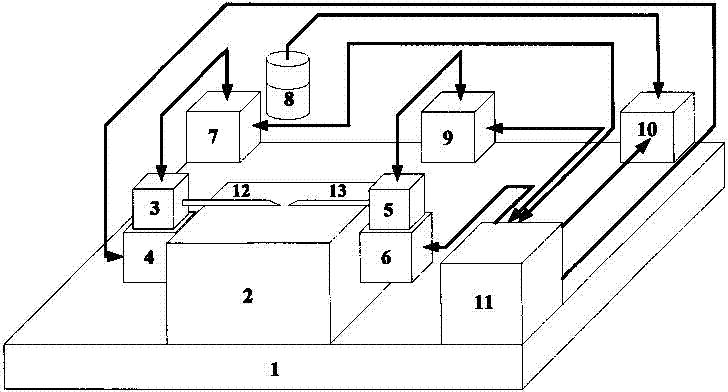
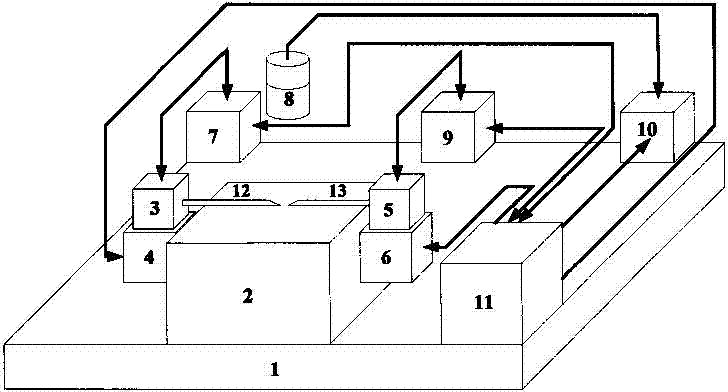
[0018] Please refer to Fig. 1, a biomedical-oriented micro-manipulation robot system of the present invention includes a microscope 2, a left micro-manipulator 3, a right micro-manipulator 5, a left manipulation tool 12 (micro pipette), a right manipulation tool 13 ( microinjection needle), left hand servo controller 7, right hand servo controller 9, camera 8, image processing card 10, computer 11, cell adsorption device 4, gene injection device 6, vibration isolation platform 1, etc. It can complete cell cutting, fusion, injection, chromosome cutting, picking and other micro operations.
[0019] The left and right operating tools 12 and 13 are mounted on the left and right micro-manipulators 3 and 5 respectively, the left micro-manipulators 3 and 5 are three-degree-of-freedom rectangular coordinate motion platforms driven by micro-DC servo linear motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More