

Parameter identification control device and control method of sensorless permanent magnet synchronous motor
A permanent magnet synchronous motor, parameter identification technology, applied in the direction of motor generator control, electromechanical transmission control, electronic commutation motor control, etc., can solve the problem of parameter identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
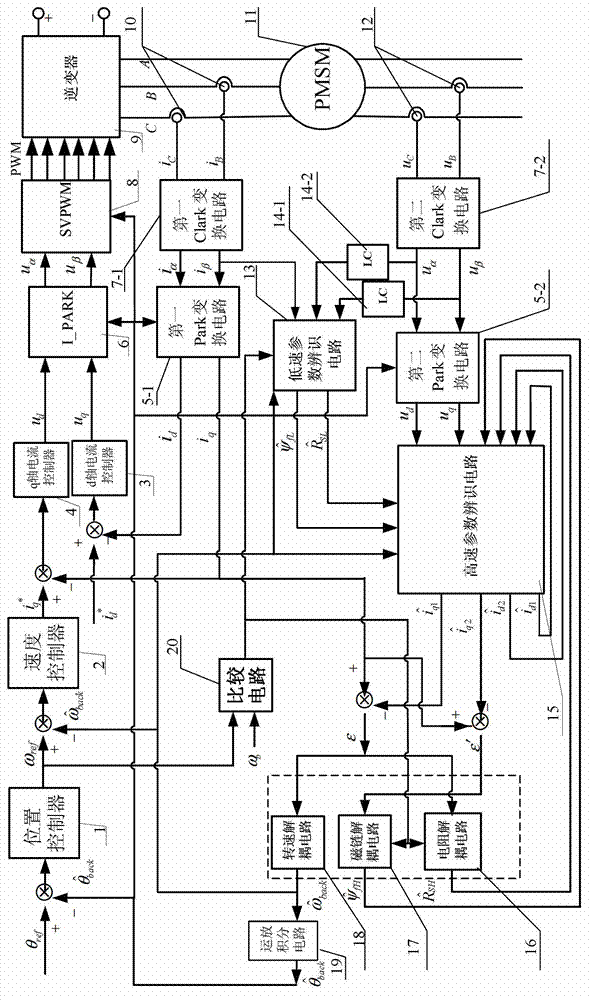
[0042] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the parameter identification control device of sensorless permanent magnet synchronous motor described in this embodiment, it includes permanent magnet synchronous motor 11, it also includes position sensor 1, speed controller 2, d-axis current controller 3, q Shaft current controller 4, first Park transformation circuit 5-1, second Park transformation circuit 5-2, inverse Park transformation circuit 6, first Clark transformation circuit 7-1, second Clark transformation circuit 7-2, space vector Pulse width modulation circuit 8, inverter 9, current transformer 10, voltage sensor 12, low-speed parameter identification circuit 13, first LC filter circuit 14-1, second LC filter circuit 14-2, high-speed parameter identification circuit 15, Resistance decoupling circuit 16, flux linkage decoupling circuit 17, speed decoupling circuit 18, operational amplifier integration circuit 19...
specific Embodiment approach 2
[0048] Specific implementation mode two: the following combination figure 1 This embodiment is described. This embodiment is a parameter identification control method for a sensorless permanent magnet synchronous motor based on the parameter identification control device for a sensorless permanent magnet synchronous motor described in Embodiment 1.
[0049] Comparator circuit 20 takes motor rotor speed given signal value ω ref Compared with the motor rotor speed ω bAfter the comparison, the operating mode of the control device is controlled by the comparison result, specifically:
[0050]
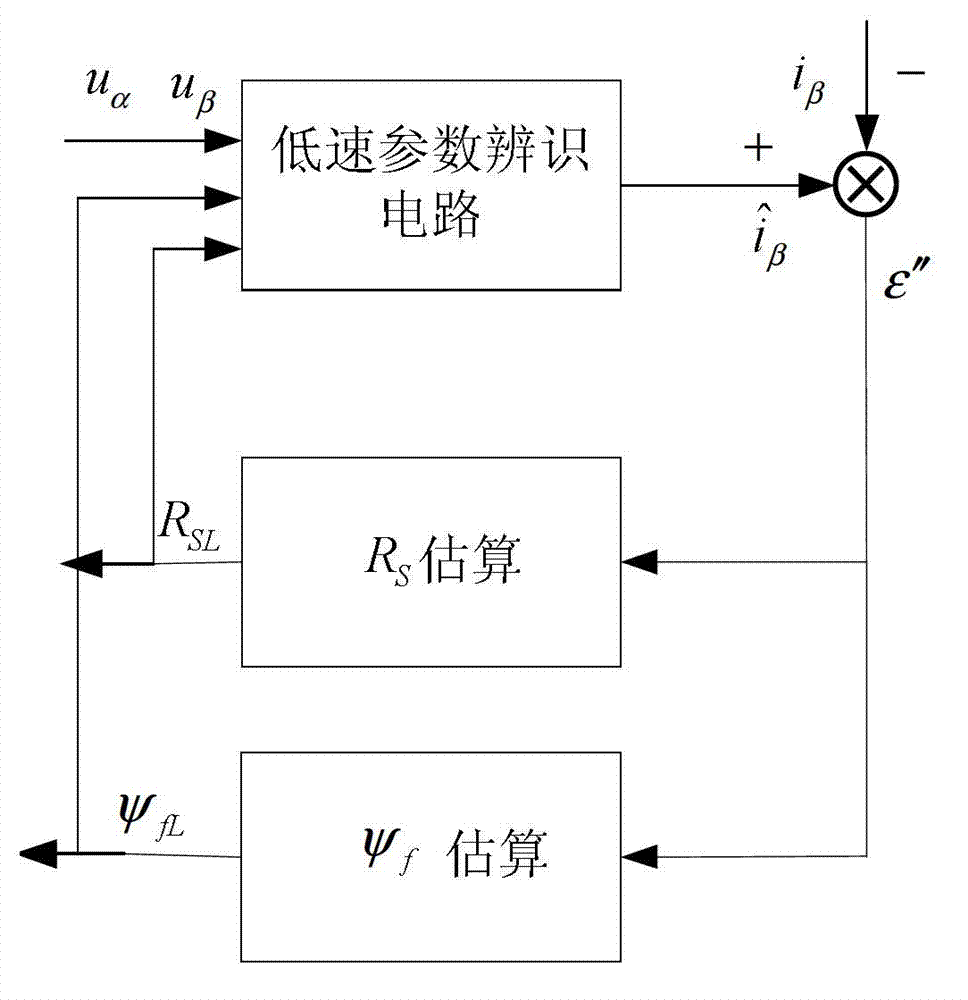
[0051] when ω ref b , the low-speed parameter identification circuit 13 is enabled under the control of the selection control signal output by the comparison circuit 20, and the flux linkage decoupling circuit 17 and the resistance decoupling circuit 16 stop running. At this time, the β output from the first LC filter circuit 14-1 The axis filtered voltage signal and the α-axis filter...
specific Embodiment approach 3
[0054] Specific implementation mode three: the following combination figure 2 Describe this embodiment, this embodiment is a further description of Embodiment 2, the d-axis current component and q-axis current It is obtained by solving the following formula:
[0055] d dt i ^ d 1 i ^ q 1 = - R s L s ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More