

Method for planning velocity of S-shaped acceleration and deceleration control for control system of numerical control equipment
A technology of acceleration and deceleration control and control system, applied in the field of numerical control, can solve the problem that motion output control cannot meet the requirements of real-time performance, and achieve the effects of avoiding jitter and shock, improving processing capacity and improving processing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Before describing the specific implementation manner of the present invention in detail, let us first introduce the relevant content about the S-curve technology.
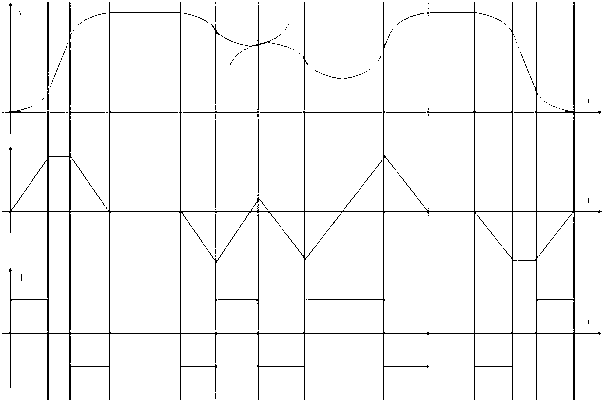
[0047] The S-shaped speed calculation method is the key technology of the current project. The algorithm goal is to control the continuity of acceleration changes to achieve a smooth transition of speed and ensure mechanical stability. Since the curves of the actual processing process are all arbitrary trajectories, the speed curve output by the controller is not a complete S-shaped curve. Generally, the speed curve output by one processing is composed of countless S-shaped speed curves. like figure 1 Shown:
[0048] from figure 1 It can be seen from the above that the distance (S) will be the cubic relationship of time (t), which is one more power than the T-type acceleration and deceleration control mode relationship. Therefore, the change of acceleration in the speed look-ahead process prevents us fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More