

Two-degree-of-freedom static load balancing in-parallel movement simulation platform
A technology of motion simulation and moving platform, applied in teaching models, instruments, educational appliances, etc., can solve the problems of small working space, low carrying capacity, difficult to guarantee assembly accuracy, etc., and achieve large working space, stable performance, easy installation and The effect of maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
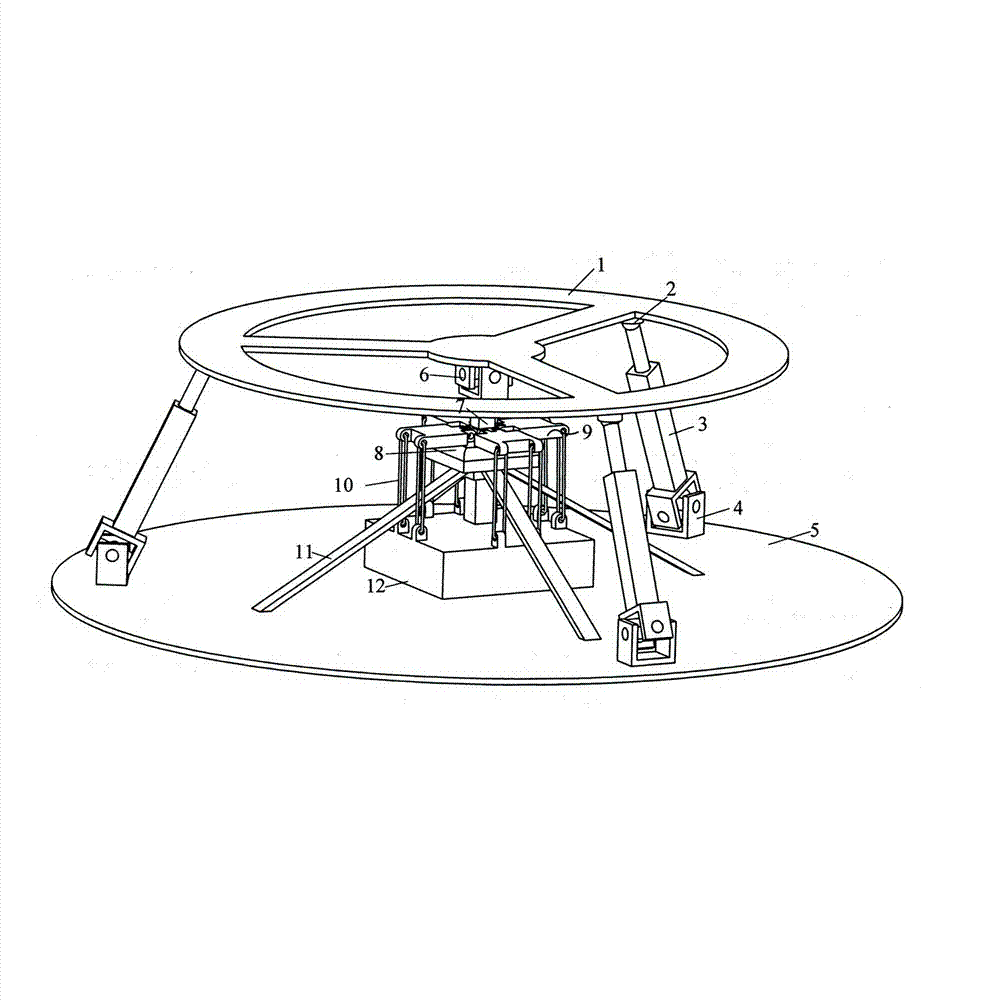
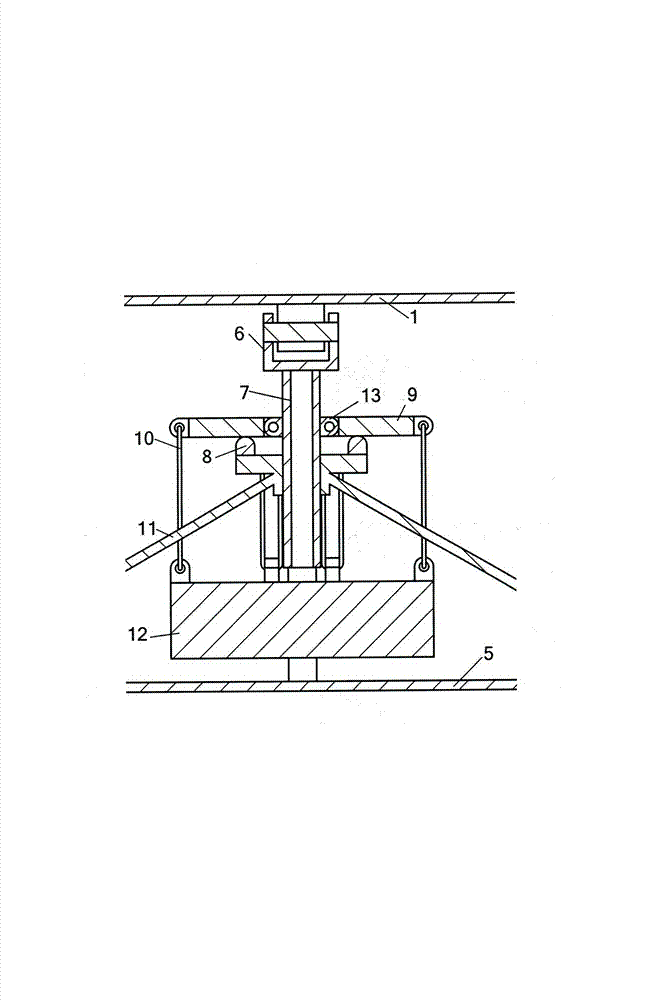
[0032] exist figure 1 and figure 2 In the schematic diagram of the structure of the two-degree-of-freedom static load balance parallel motion simulation platform shown, three first universal joints 4 of UPS drive branches with identical structures and uniform distribution are fixed on the fixed platform 5, and the three first The center of the universal joint is arranged in an equilateral triangle on the fixed platform; the tail of the electric cylinder 3 is connected with the above-mentioned first universal joint, the telescopic rod of the electric cylinder is connected with the ball joint 2, and the ball joint is connected with the moving platform 1, and the three balls The hinge centers are arranged in an equilateral triangle on the moving platform. The middle restraint branch of UP is located on the line connecting the center of the moving platform and the fixed platform. The supporting frame 11 is composed of the supporting platform and four legs fixed on the four sides...
Embodiment 2
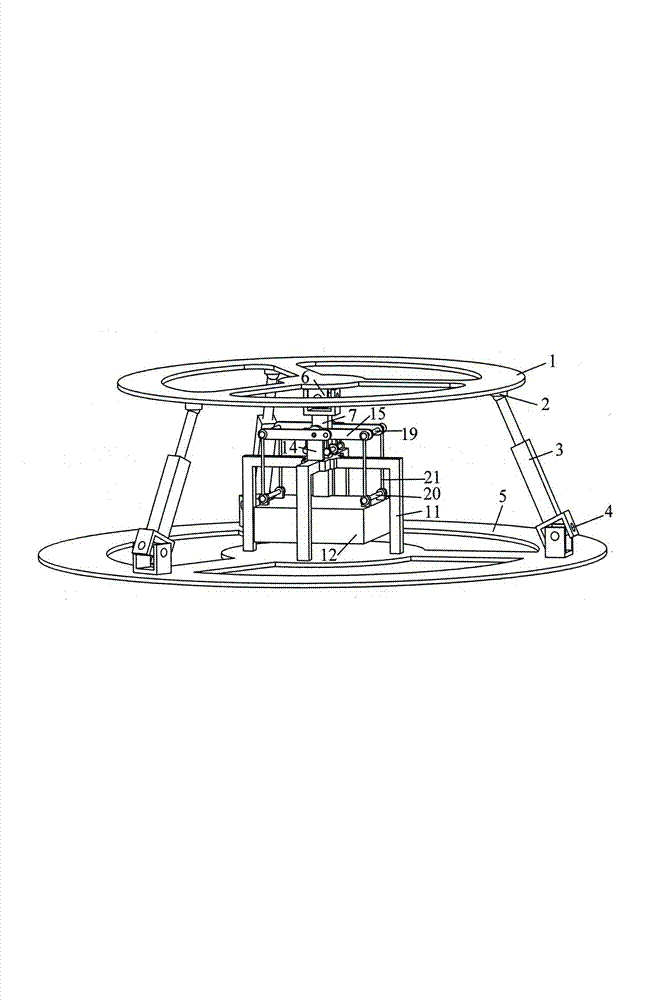
[0034] exist image 3 and Figure 4In the schematic diagram of the structure of the two-degree-of-freedom static load balance parallel motion simulation platform shown, the middle restraint branch of UP is located on the line connecting the center of the moving platform and the fixed platform, and the support frame 11 is composed of two gate-shaped brackets perpendicularly intersecting. A square through hole is formed in the center, and the four legs of the support frame are fixedly connected with the fixed platform 5; the second universal hinge 6 is connected with the moving platform 1, the upper end of the moving pair 7 is connected with the above-mentioned second universal hinge, and the lower end is inserted into the above-mentioned support In the square through hole of the frame, the line connecting the center of the second universal joint and the center of the moving platform is perpendicular to the moving platform. Two lever support frames 14 are respectively fixed on ...
Embodiment 3
[0036] exist Figure 5 and Figure 6 In the schematic diagram of the structure of the two-degree-of-freedom static load balance parallel motion simulation platform shown, the middle restraint branch of UP is located on the line connecting the center of the moving platform and the fixed platform, and one end of the second universal joint 6 is connected to the moving platform 1, and its The other end is connected with the mobile pair 25 with spring 23 built in, the support sleeve 22 of the support frame 11 is fixed on the outside of the above-mentioned mobile pair, one end of the four legs of the support frame is fixedly connected with the above-mentioned support sleeve, and the other end is connected with the fixed sleeve. The platform is fixedly connected, and a guide sleeve 24 is provided between the upper end of the casing of the support frame and the moving pair, and the line connecting the center of the second universal joint and the center of the moving platform is perpen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More