

Welding robot control method
A welding robot and control method technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc. Operation space limitation and other problems, to achieve the effect of simplifying the teaching process, shortening the movement, i.e. empty distance, and strong anti-electromagnetic field interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
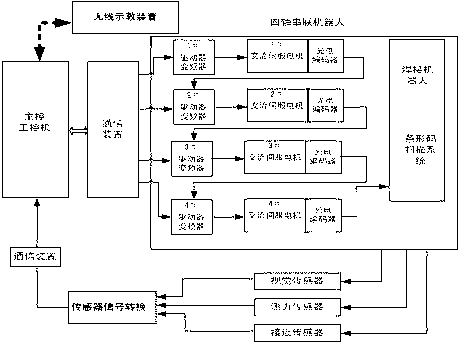
[0030] Such as figure 1 As shown, the welding robot control method is used to detect the sensors of various states of the robot, monitor the force state, rotation angle and speed of each arm of the robot in real time, and capture the information of the welding seam at the same time to form a closed-loop control of the robot.
[0031] The signal conversion device, the sensor converts various signals detected and transmits them to the industrial computer through the communication device. The main industrial computer receives the signal from the wireless teaching device for analysis and processing and completes the human-computer interaction function. The main industrial computer receives the signals from various sensors and performs mechanical calculations, and the control system solves the calculation to form a control error signal. The driving device is used to drive the robot to work by receiving the command sent by the main industrial computer. The wireless teaching device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More