

Backstepping control method of pneumatic position servo system
A servo system, pneumatic position technology, applied in the direction of fluid pressure actuation system components, fluid pressure actuation devices, mechanical equipment, etc., can solve the problem of insufficient tracking control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
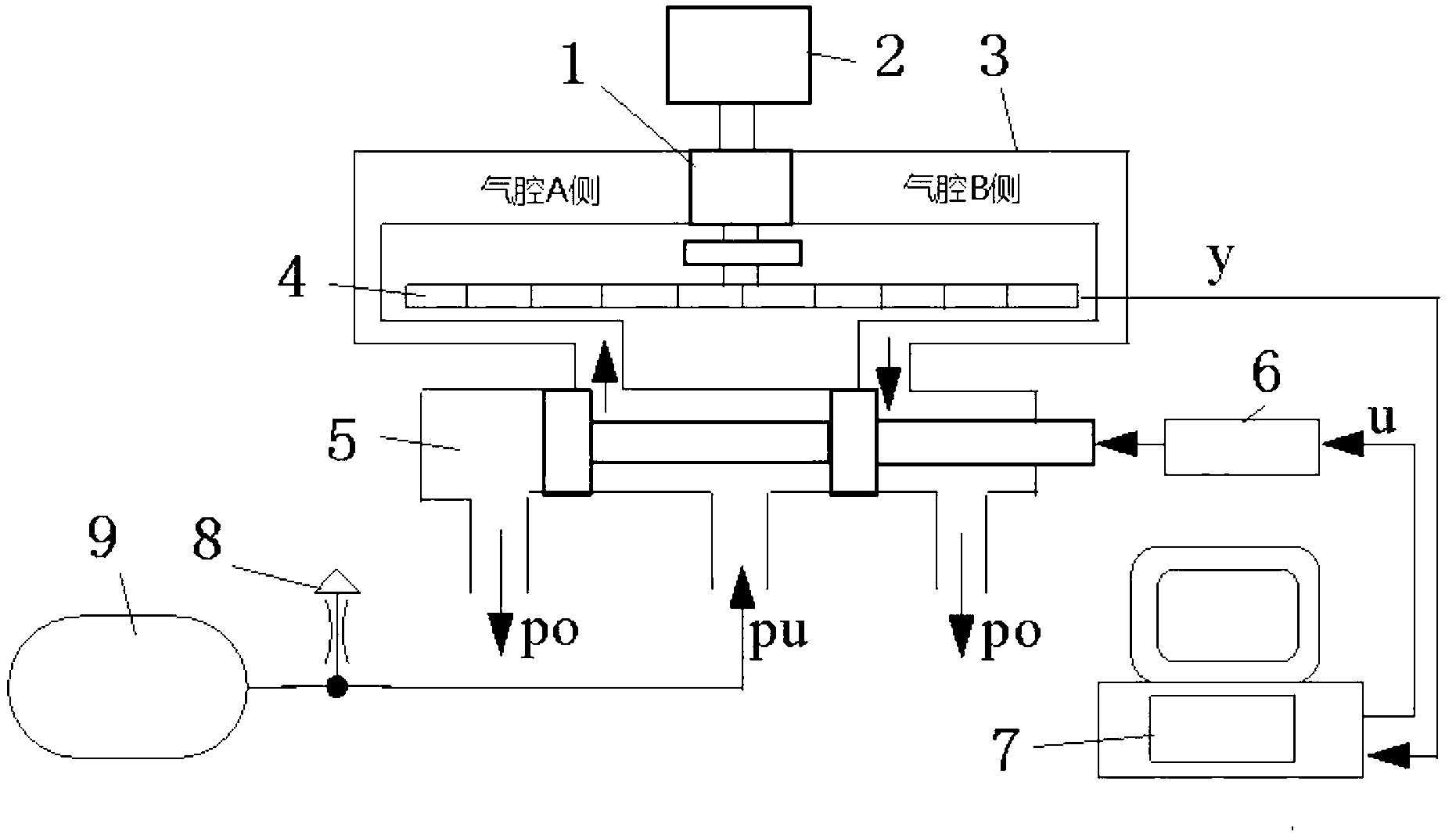
[0060] Each component in the structure of the pneumatic position servo system is selected separately: the rodless cylinder of FESTO company (the model used is DGPL-25-450-PPV-A-B-KF-GK-SV); the five-way proportional valve (the model used is MPYE -5-1 / 8-HF-010-B); sliding resistance linear displacement detector (the model used is MLO-POT-450-TLF, and the position detection accuracy is 0.15mm after matching with the acquisition card); computer (the model used is The model is CPU (P21.2GHz); general data acquisition card (the model used is PCI2306); air pump and other components constitute the pneumatic position servo system. The built-in control software of the computer is compiled by VB, and the change curve of related variables in the control process is displayed on the screen.
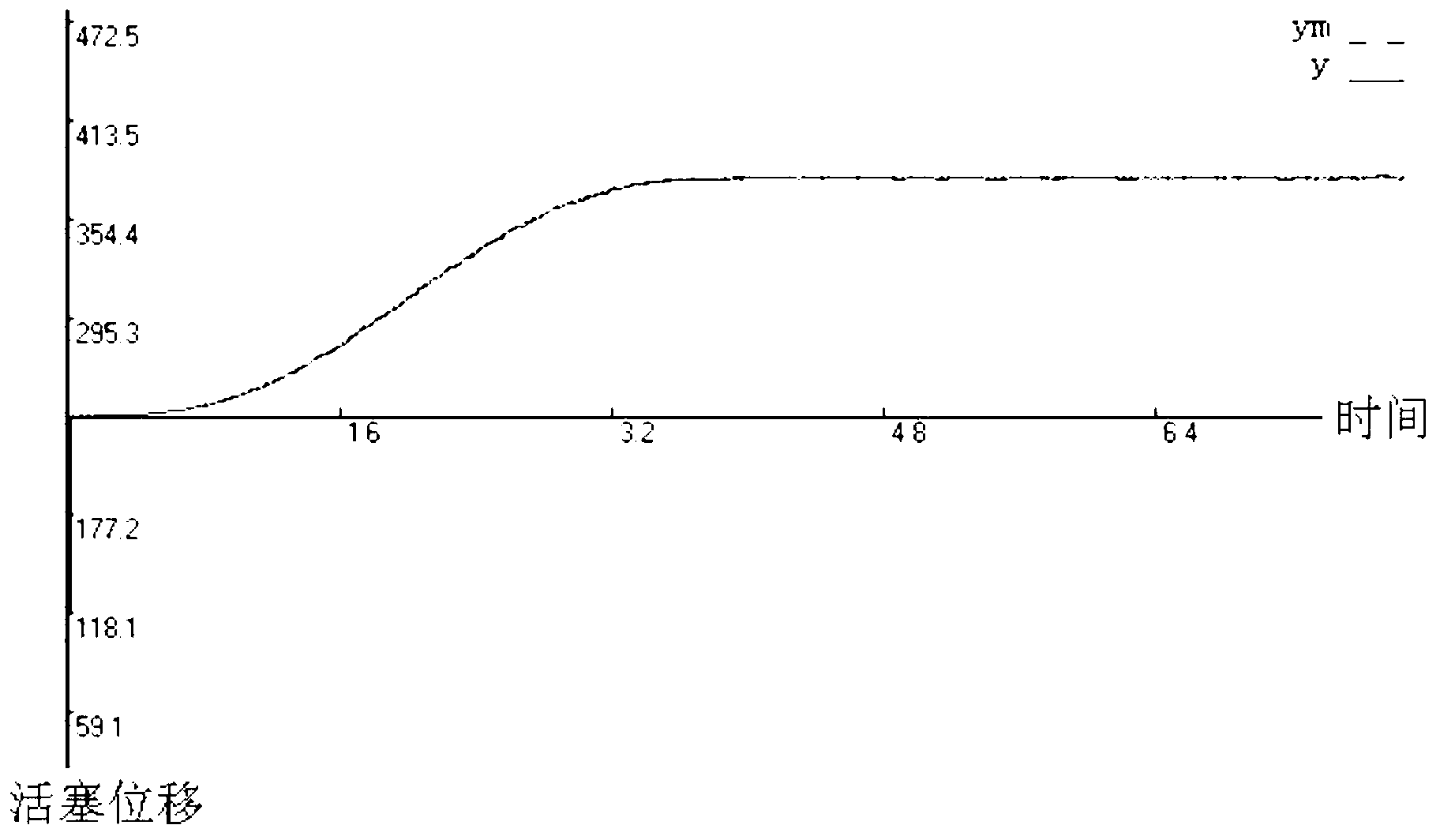
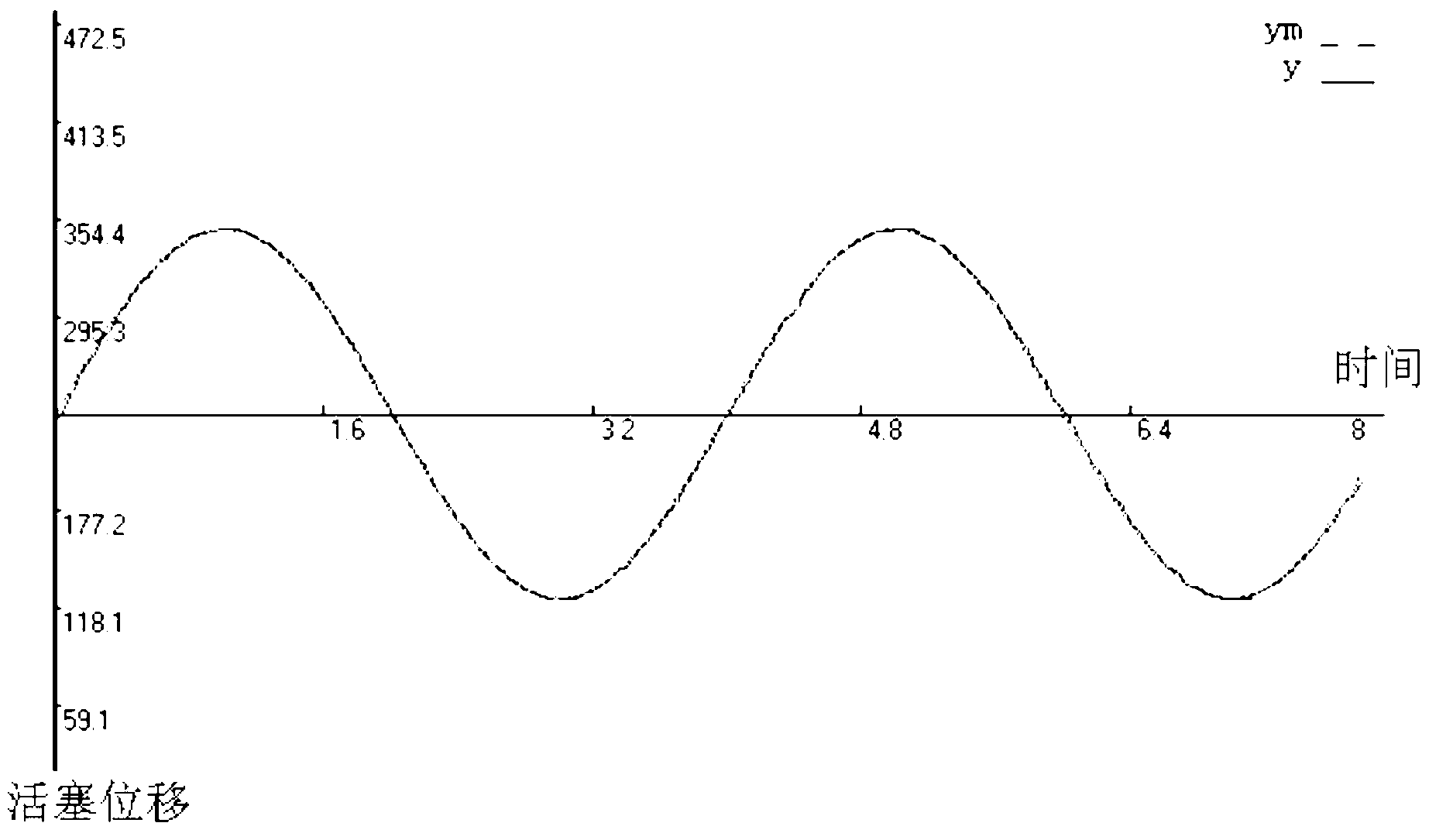
[0061] The control targets are set to
[0062] Reference signal 1: S-curve
[0063] the y d =-(A / ω 2 )sin(ωt)+(A / ω)t, (7)
[0064] The value of A is 55.825, and the value of w is 0.5π.
[0065] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More