

Robot bouncing mechanism based on hydraulic drive
A robot and hydraulic technology, applied in the field of robot bouncing mechanism, can solve the problems of low power/mass ratio of motor drive device, low energy utilization rate of robot, inability to adjust jump height, etc., so as to improve obstacle-surmounting ability and range of activities, and has a compact structure. , the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
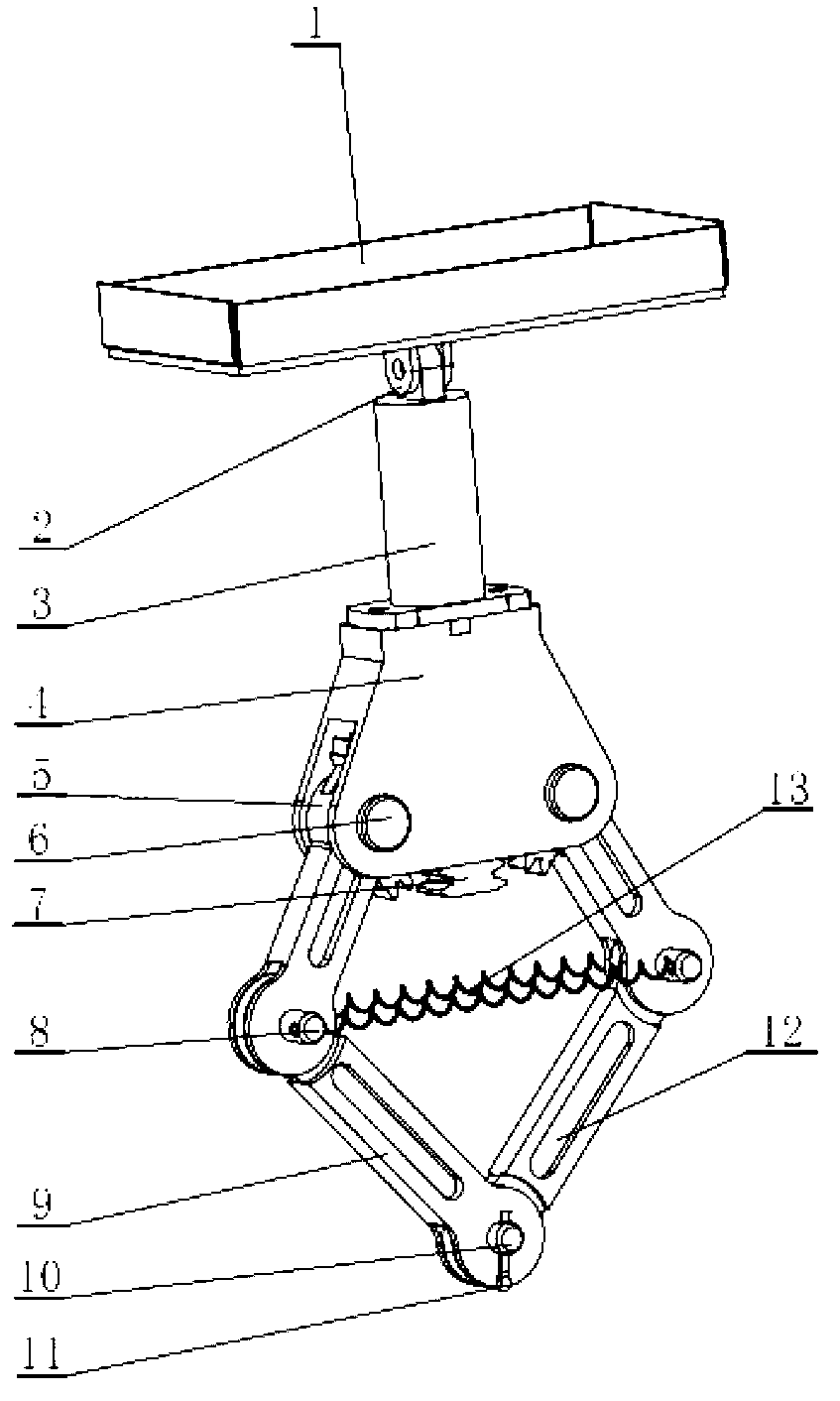
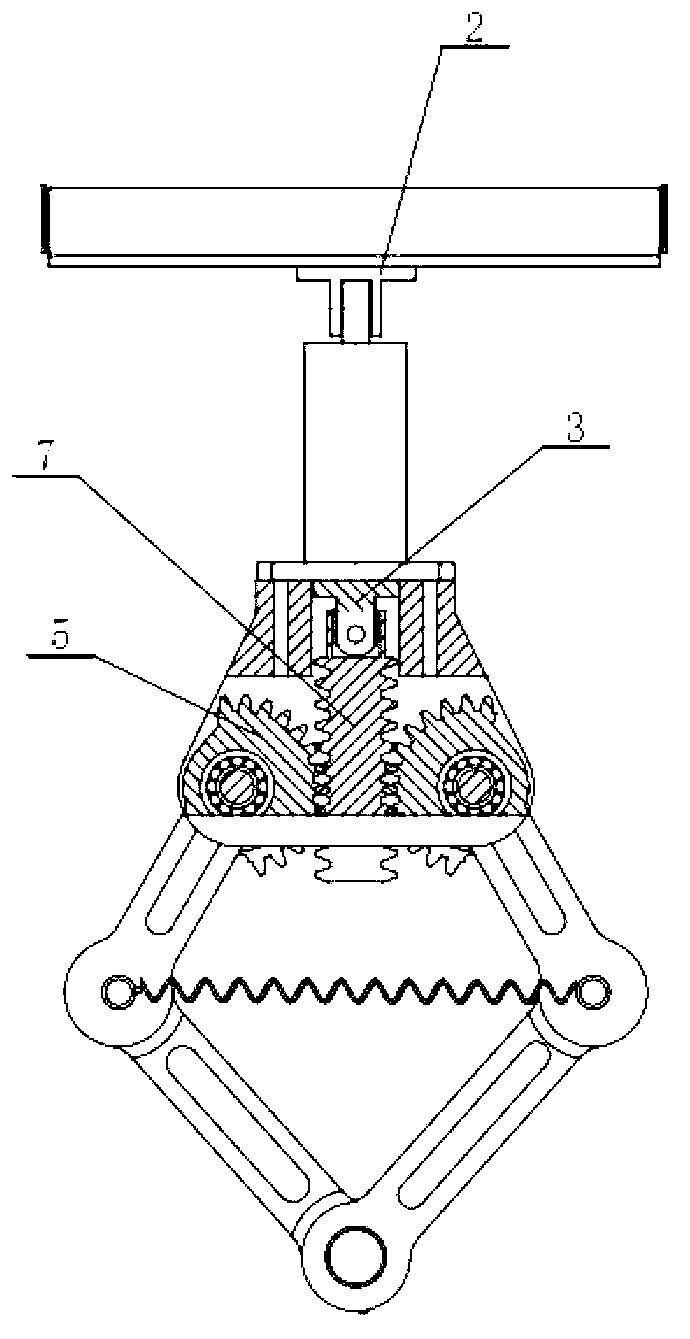
[0019] This embodiment is a robot bounce mechanism based on hydraulic drive.
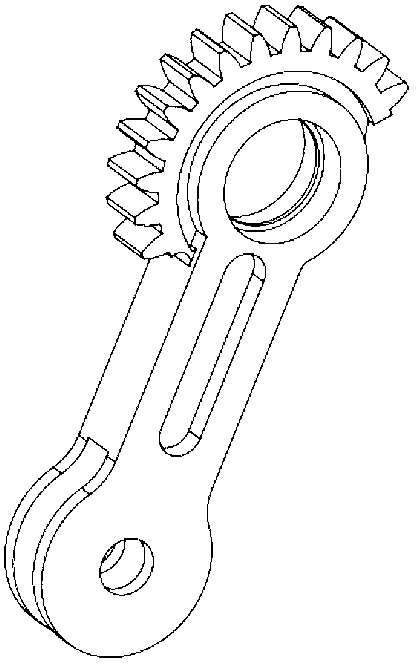
[0020] refer to figure 1 , figure 2 , the present invention is based on a hydraulically driven robot bounce mechanism, which consists of a hydraulic device 1, a hydraulic cylinder 3, a connecting seat 2, a connecting frame 4, a toothed connecting rod 5, a rotating shaft 6, a double-sided rack 7, a pin shaft 8, and a second connecting rod 9. The connecting shaft 10, the cotter pin 11, the third connecting rod 12, and the spring 13 are composed. The hydraulic device 1 is installed on the body of the robot, and the hydraulic cylinder 3 is installed under the hydraulic device 1 through the connecting seat and the lug on the top of the hydraulic cylinder. Connection, the connecting flange at the lower end of the hydraulic cylinder 3 is fixedly connected with the connecting frame 4 through bolts. The double-sided rack 7 is fixedly installed in the middle part of the connecting frame 4, and the lower en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More