

Mechanical arm motion control method
A technology of motion control and robotic arm, applied in the direction of manipulators, manufacturing tools, etc., can solve problems such as modeling and robot control difficulties, and achieve the effect of convenient operation, fast response and complete tracking, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described below in conjunction with the accompanying drawings.
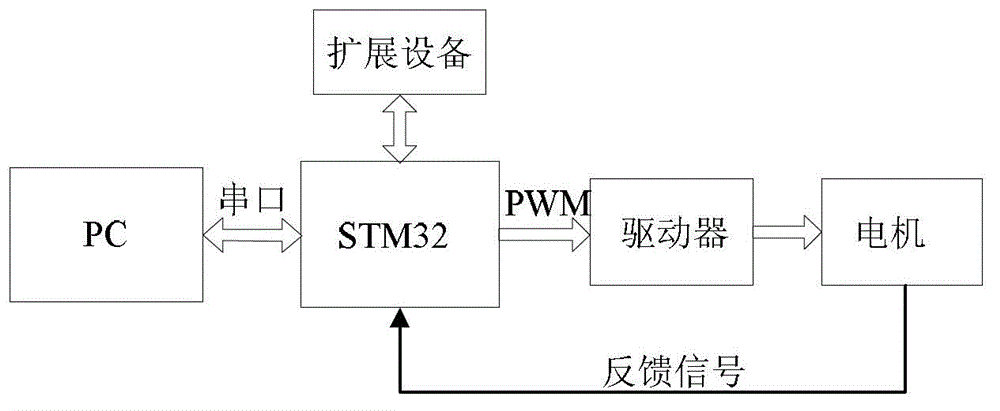
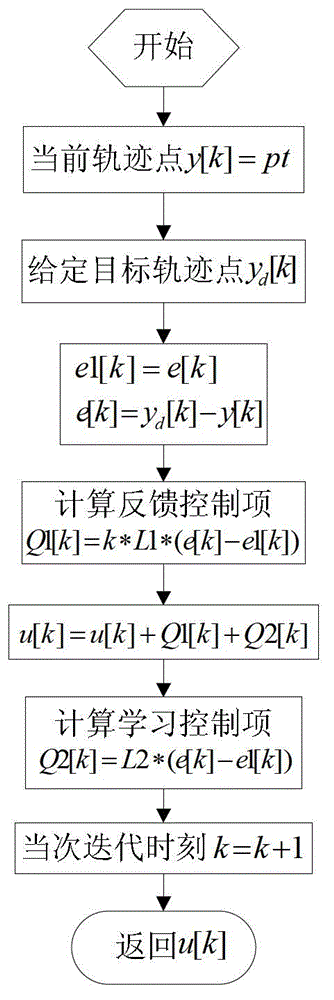
[0014] refer to figure 1 and figure 2 , a kind of mechanical arm motion control method, described method comprises the following steps:
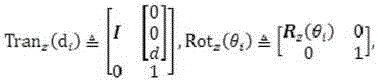
[0015] (1) According to the actual parameters of the manipulator, establish a complete transformation transfer matrix corresponding to n connecting rods and further calculate the linear velocity and angular velocity of each connecting rod;
[0016] (2) Calculate the center of mass of the connecting rod to obtain the inertia tensor, and then calculate the total kinetic energy and total potential energy of the manipulator, calculate the partial derivative of the difference between the total kinetic energy and the total potential energy with respect to the generalized coordinate q of the manipulator, and obtain the driving force Vector τ with relationship, the Corresponding to the speed of each joint, and establish a mathematical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More