

Wheel-legged mobile robot suitable for complicated terrains
A mobile robot and complex terrain technology, applied in the field of aircraft, can solve the problems of poor load capacity and endurance, low movement reliability, and low travel efficiency, and achieve the effects of strong terrain adaptability, strong ability to cross obstacles, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
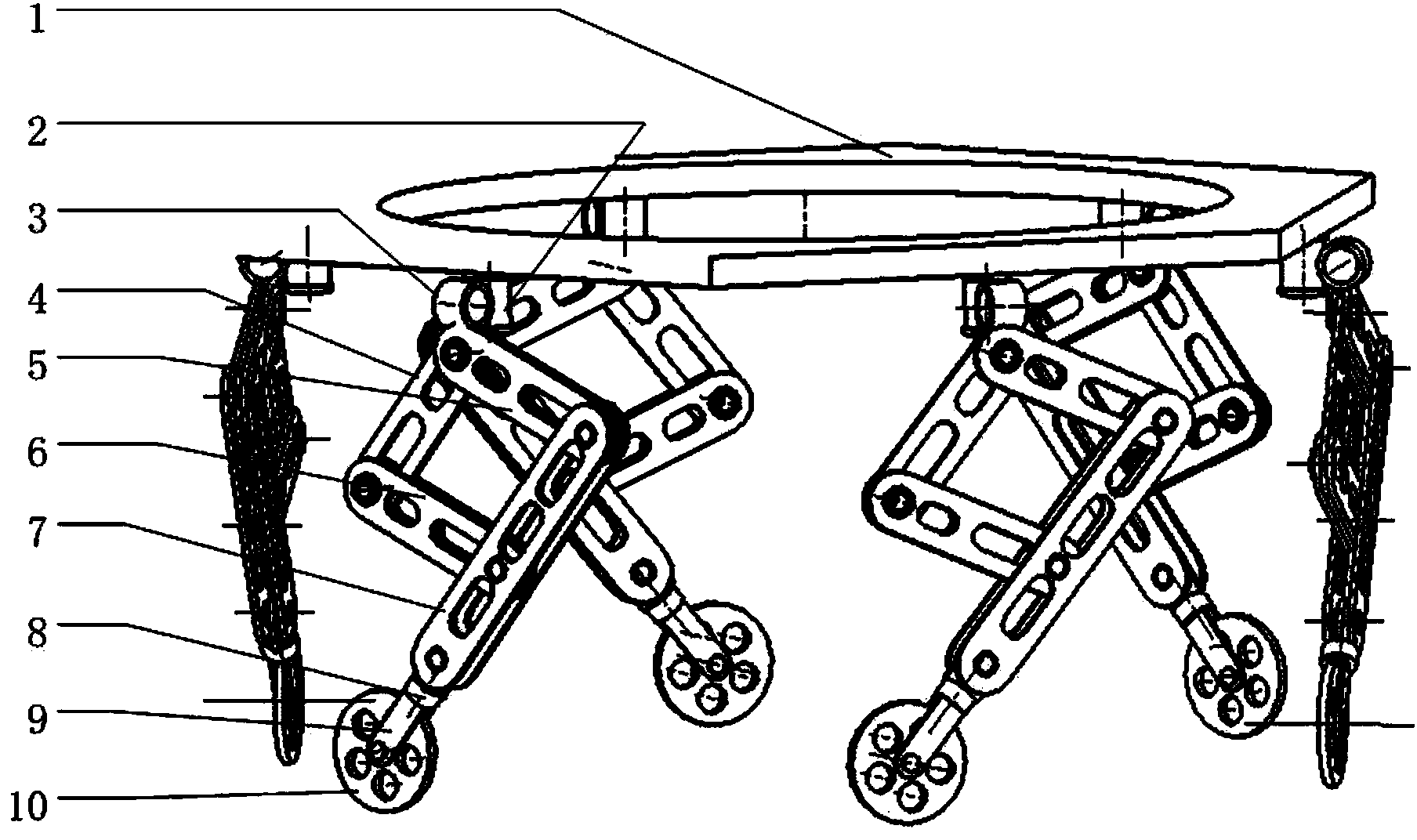
[0020] Such as figure 1 As shown, this embodiment includes: platform 1, six wheel leg systems evenly arranged on the edge of platform 1, each wheel leg system has the same structure, including: steering mechanism 2, turning mechanism 3, swing lifting mechanism, rotating mechanism 8, rotating mechanism The wheel mechanism 9 and the wheels 10, wherein: the steering mechanism 2 is fixed on the platform 1 and connected with the turning mechanism 3, the two ends of the swing lifting mechanism are respectively connected with the turning mechanism 3 and the rotating mechanism 8, and the wheels 10 are connected to the bottom of the rotating mechanism 8 .
[0021] The steering mechanism 2 includes a first rotation pair, and the first rotation pair includes: two cylinders whose axes are perpendicular to each other and connected to each other.
[0022] The turning mechanism 3 includes a second rotation pair, and the second rotation pair includes: a cylindrical annulus and a cylinder con...
Embodiment 2
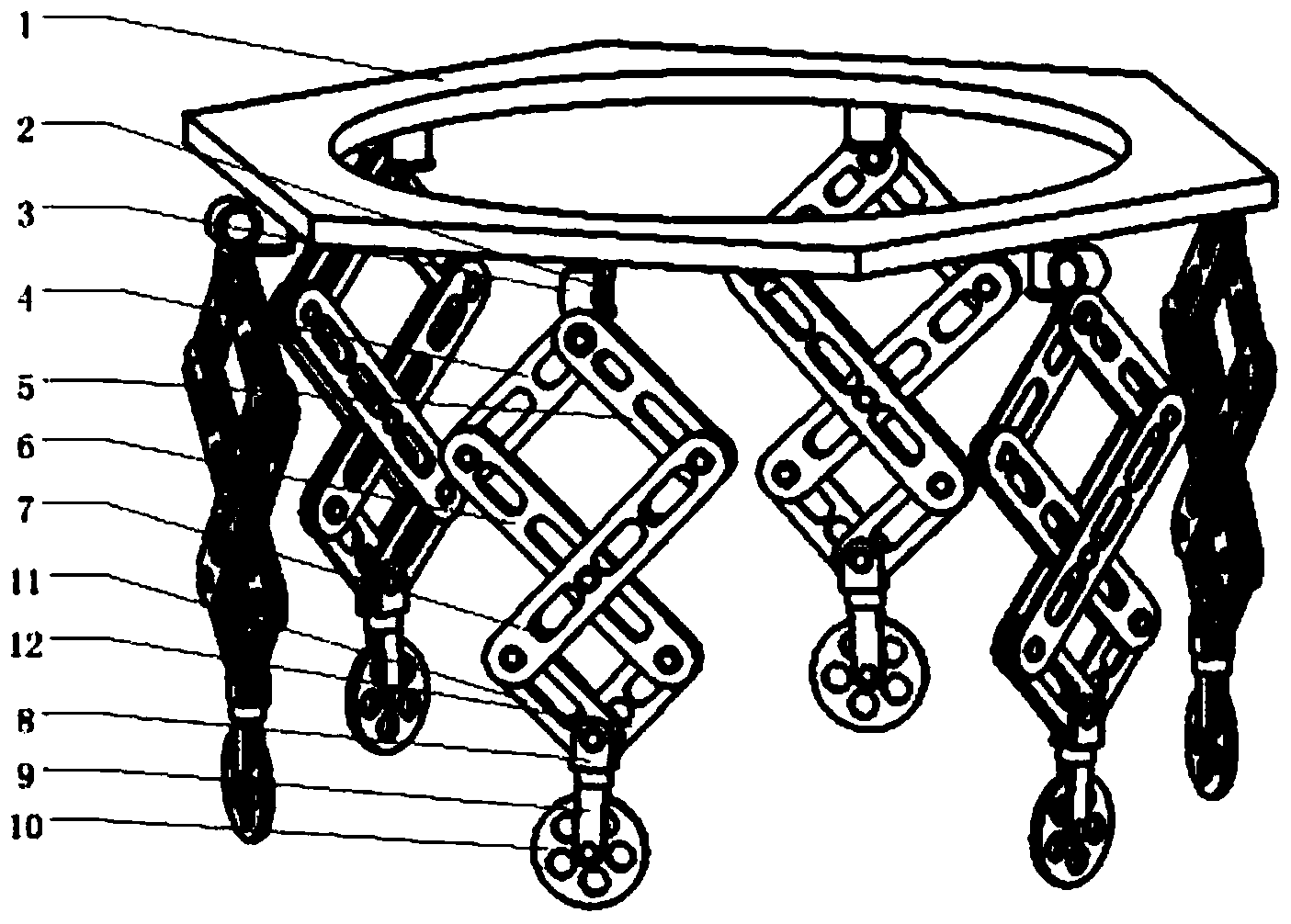
[0032] Such as figure 2 As shown, the structure of this embodiment is partly the same as that of Embodiment 1, but the swing lifting mechanism of this embodiment includes: two active rods 4, 5 with the same structure and two driven rods 6, 7, wherein: two active The two ends of the rods 4 and 5 are jointly connected with the turning mechanism 3, and the other two ends are respectively connected with the ends of the two driven rods 6 and 7. The structures of the two driven rods are the same, and the first driven rod The middle part of 6 is connected with the middle part of the second driven rod 7, and the other two ends of the two driven rods 6, 7 are respectively connected with one side ends of the two extension rods 11, 12, and the two extension rods 11, 12 have the same structure and the other side ends are connected to each other and connected to the rotating mechanism 8.
[0033] Other structures of this embodiment are the same as those of Embodiment 1.
[0034] When th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More