Lower limb rehabilitation robot system based on myoelectric signal feedback, and control method thereof
A rehabilitation robot and electromyographic signal technology, applied in sensors, passive exercise equipment, medical science, etc., can solve problems such as difficulty in mobilizing patients' awareness of active participation and self-confidence, secondary injury, and fatigue in the patient's rehabilitation process. The effect of secondary injury risk, work intensity reduction, and safety improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
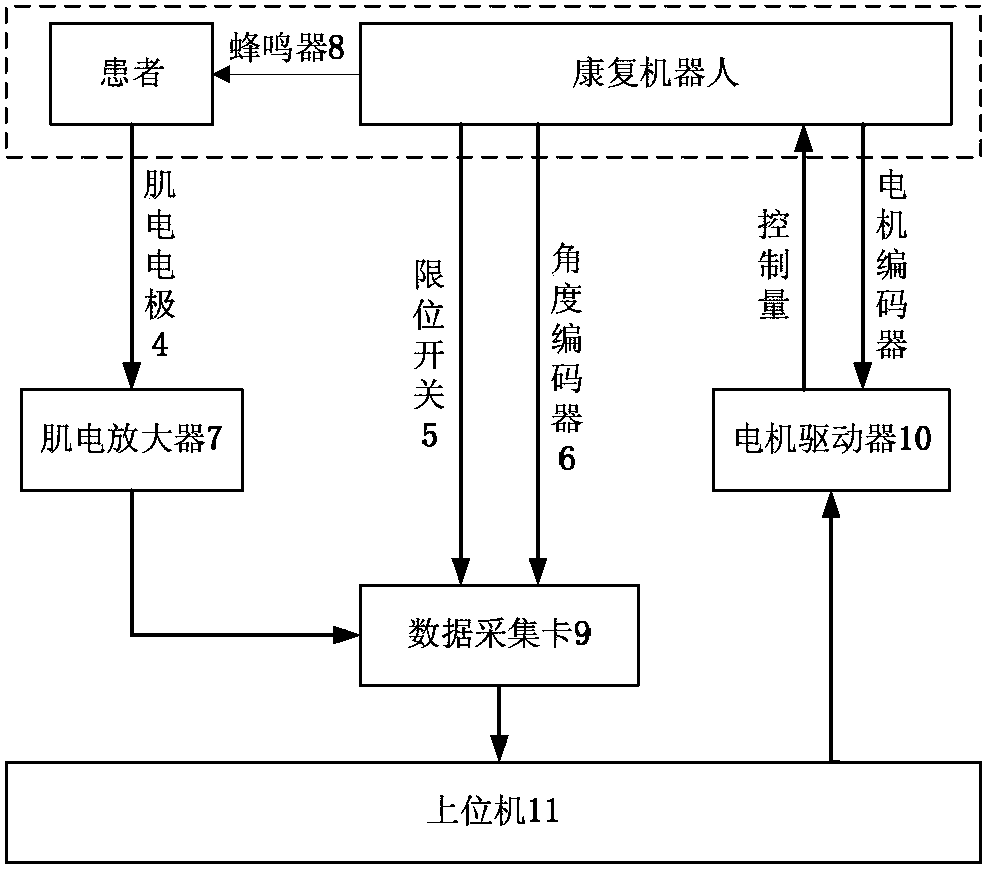
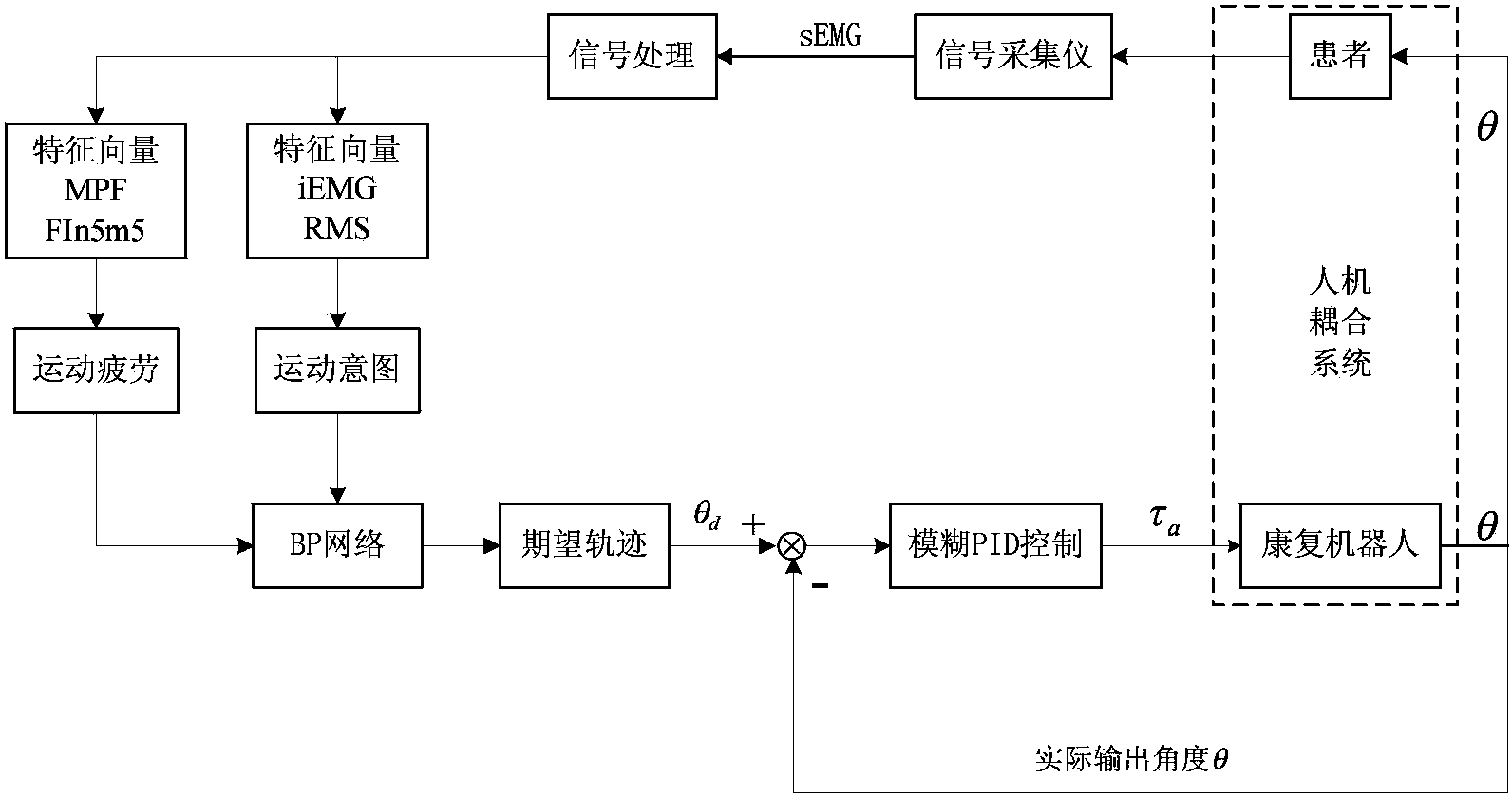
[0030] combine figure 2 and image 3 as described below;
[0031] When performing rehabilitation training for patients, it is first necessary to wipe the skin surface of the quadriceps femoris and tibialis anterior muscle with alcohol to remove dead skin and prevent it from affecting the collection effect of EMG signals. After air-drying, use the differential method to stick the EMG electrode sheet on the surface of the skin that has been wiped with alcohol. Turn on the power of the system, and the rehabilitation robot assists the patient in rehabilitation training. The surface electromyography signal is collected in real time through the electromyographic electrode sheet and the electromyographic amplifier, and the electromyographic signal is notched at 50 Hz to remove power frequency interference and amplify it by 1000 times. The data is collected by NI. The card is transmitted to the host computer; the host computer performs the following calculations on the collected EM...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More