

Master-slave minimally invasive surgical robot system and control method
A robotic system, minimally invasive surgery technology, applied in the directions of surgery, adaptive control, general control system, etc., can solve the problems of doctor's body injury, blood vessel perforation, long operation time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
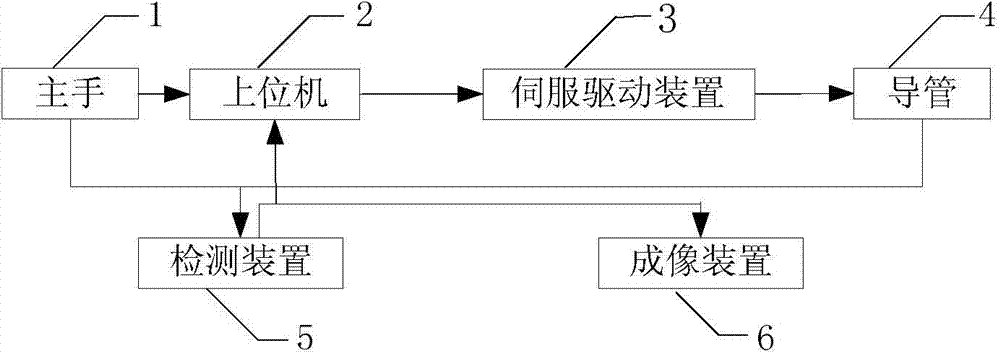
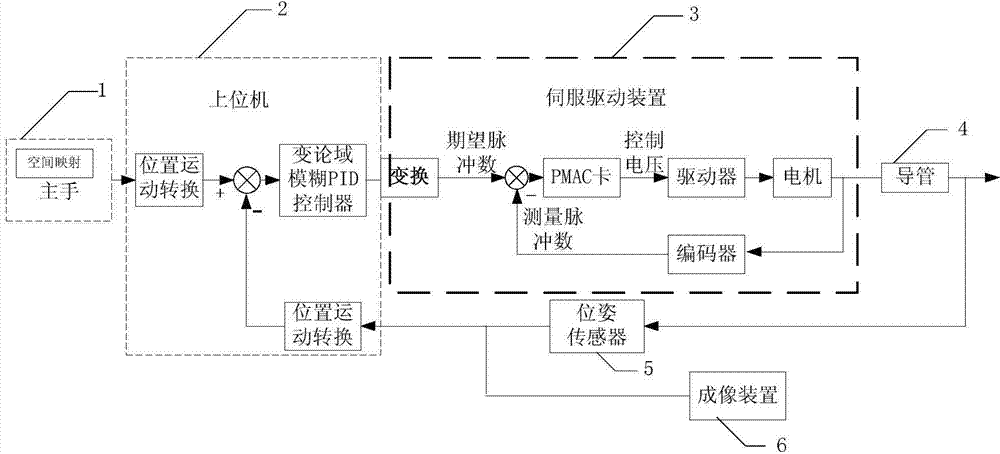
[0109] The overall structure of the master-slave minimally invasive surgical robot system adopted in this embodiment is as follows: figure 1 shown. It includes a master hand 1, a host computer 2, a servo drive device 3, a catheter 4 (the servo drive device 3 and the catheter 4 constitute the slave hand in this embodiment), a detection device 5 (a pose sensor is used in this embodiment) and an imaging device 6 . The main hand 1 is connected to the upper computer 2, and the doctor gives the expected position information of the catheter by controlling the main hand 1 and transmits it to the upper computer 2; the upper computer 2 receives the position signal transmitted by the main hand 1 and the detection device 5, and converts the signal, respectively. After obtaining the expected movement joint amount of the catheter and the actual movement jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More