

Large telescopic double-cross joint rotation shaft of parallel robot
A robot and double-cross technology, applied in the direction of manipulator, program-controlled manipulator, claw arm, etc., can solve the problems of small telescopic amount, large moving range of robot lower chassis, large sliding friction resistance, etc., and achieve high telescopic speed, assembly and disassembly. Convenience and resistance reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Combine below figure 1 The present invention is described further.
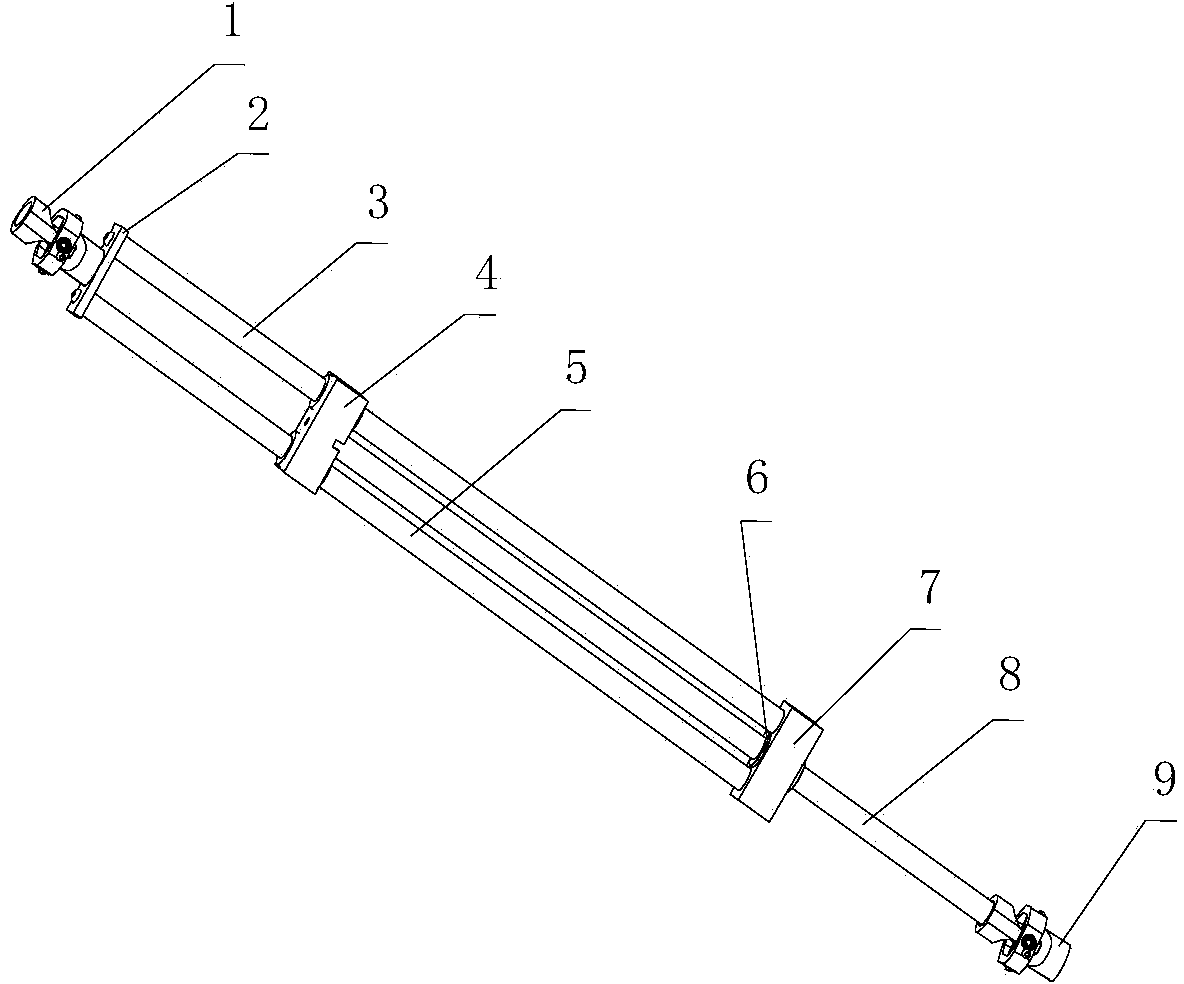
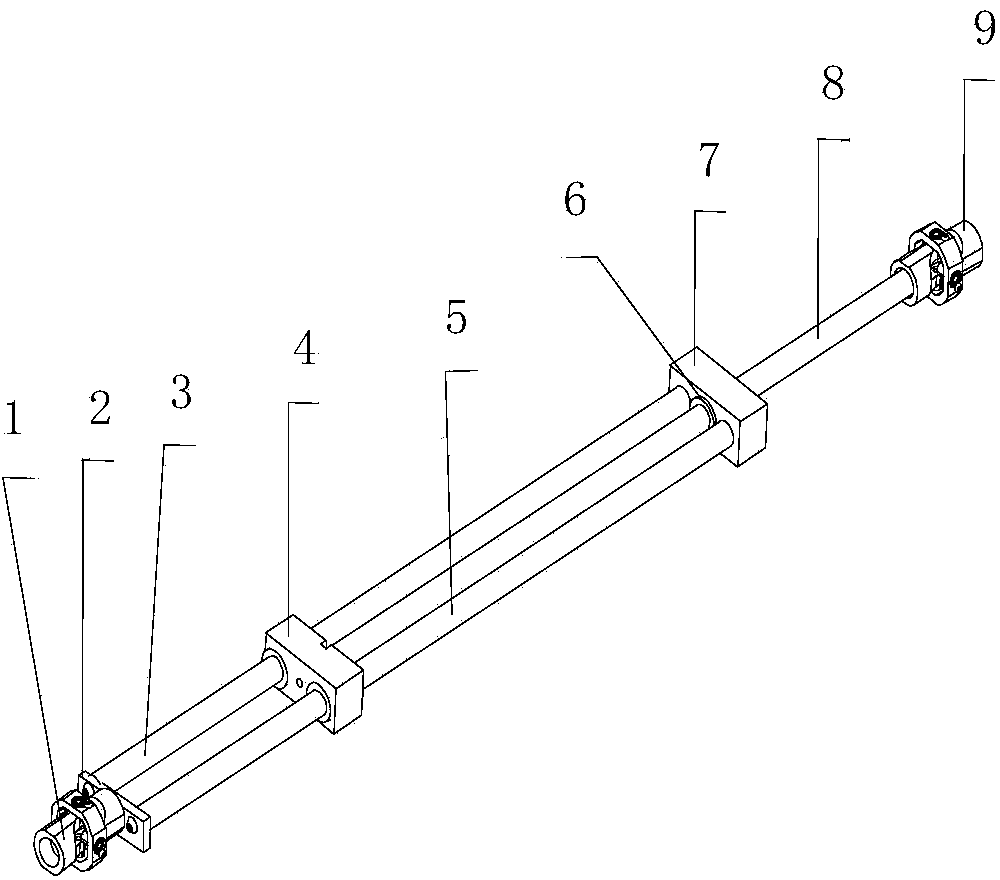
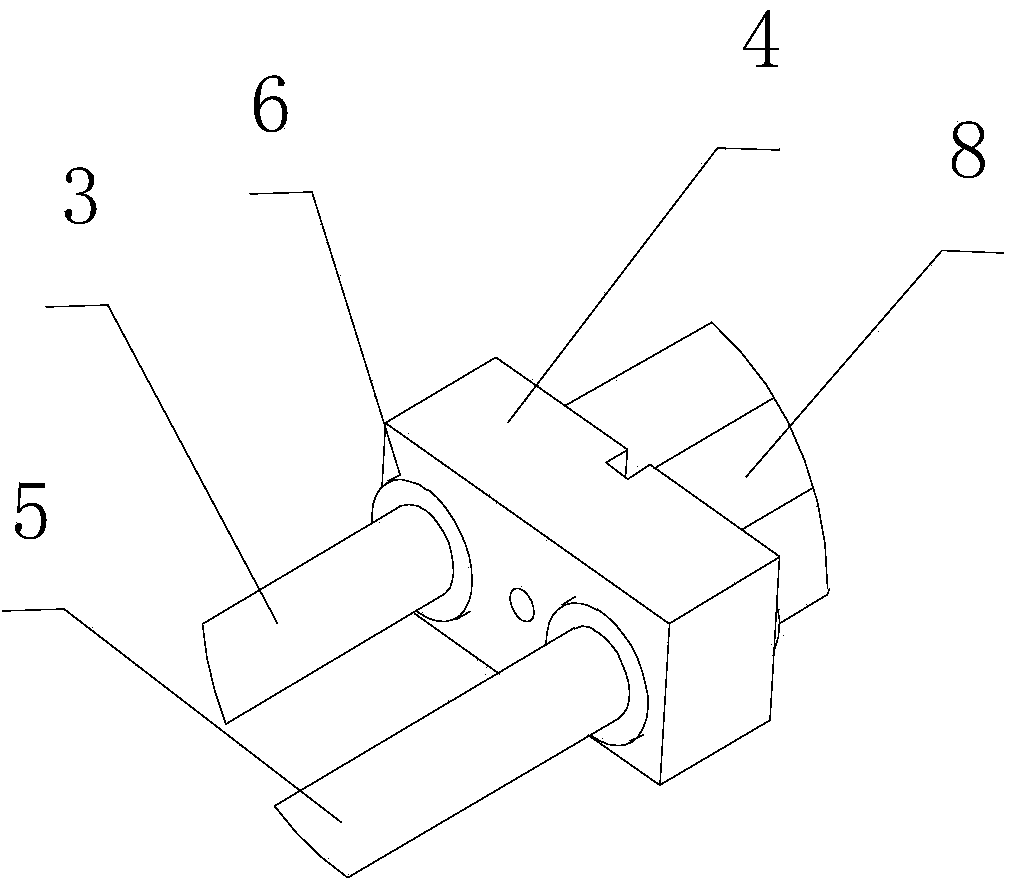
[0026] A large telescopic double cross joint rotary shaft of a parallel robot, mainly composed of three parts, including an upper cross universal joint 1, a lower cross joint 9 and a telescopic rod assembly in the middle, characterized in that the telescopic rod assembly includes a connecting top plate 2. The first hollow optical axis 3, the second hollow optical axis 5, the third hollow optical axis 8, the linear bearing 6, the intermediate connecting plate 4 and the lower connecting plate 7, the first hollow optical axis 3 and the second hollow optical axis The optical axis 5 is fixed in parallel between the connecting top plate 2 and the lower connecting plate 7 , one end of the third hollow optical axis 8 is fixed at the center of the middle connecting plate 4 , and the other end is fixed at the lower cross joint 9 .
[0027] The diameters of the first hollow optical axis 3 , the second hollow opt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More