

Motion control system of minimally invasive surgery robot
A robot motion and control system technology, applied in the medical field, can solve problems such as unfavorable learning and popularization, expensive RTOS software, and non-open source source code, so as to reduce the pain of patients.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Below in conjunction with accompanying drawing, the present invention is described in further detail.
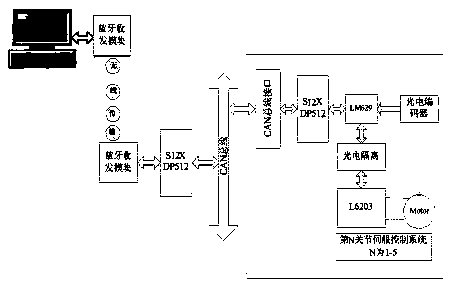
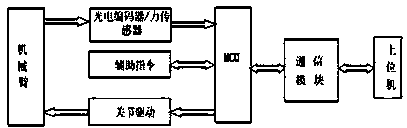
[0015] Such as figure 1 As shown, the present invention proposes a minimally invasive surgical robot motion control system. This system selects Maxon's RE30-310007 type DC motor as the joint motor, uses Freescale's MC9S12XDP5 12 high-performance single-chip microcomputer as the core processor of each sub-system, and selects LM629 with superior performance as the motion control algorithm Realize the main processing center. LM629 is a dedicated motion control chip, which is a leader in the field of motion control. It has integrated a 16-bit programmable digital PID controller inside, which is extremely convenient to use. In this way, the single-chip microcomputer can easily control the position and speed of the joint motor. In order to make the joint motor work at the rated power value, it is necessary to select a power driver chip and design the motor driver module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More