

Non-contact high-precision calibration method and application of workpiece coordinate system of robot
A calibration method, non-contact technology, applied in the direction of instruments, optical devices, measuring devices, etc., can solve the problems of cumbersome operation, time-consuming, uncontrollable, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0449] Example: complex robotic system process and method for recovery relocation.
[0450] system introduction:
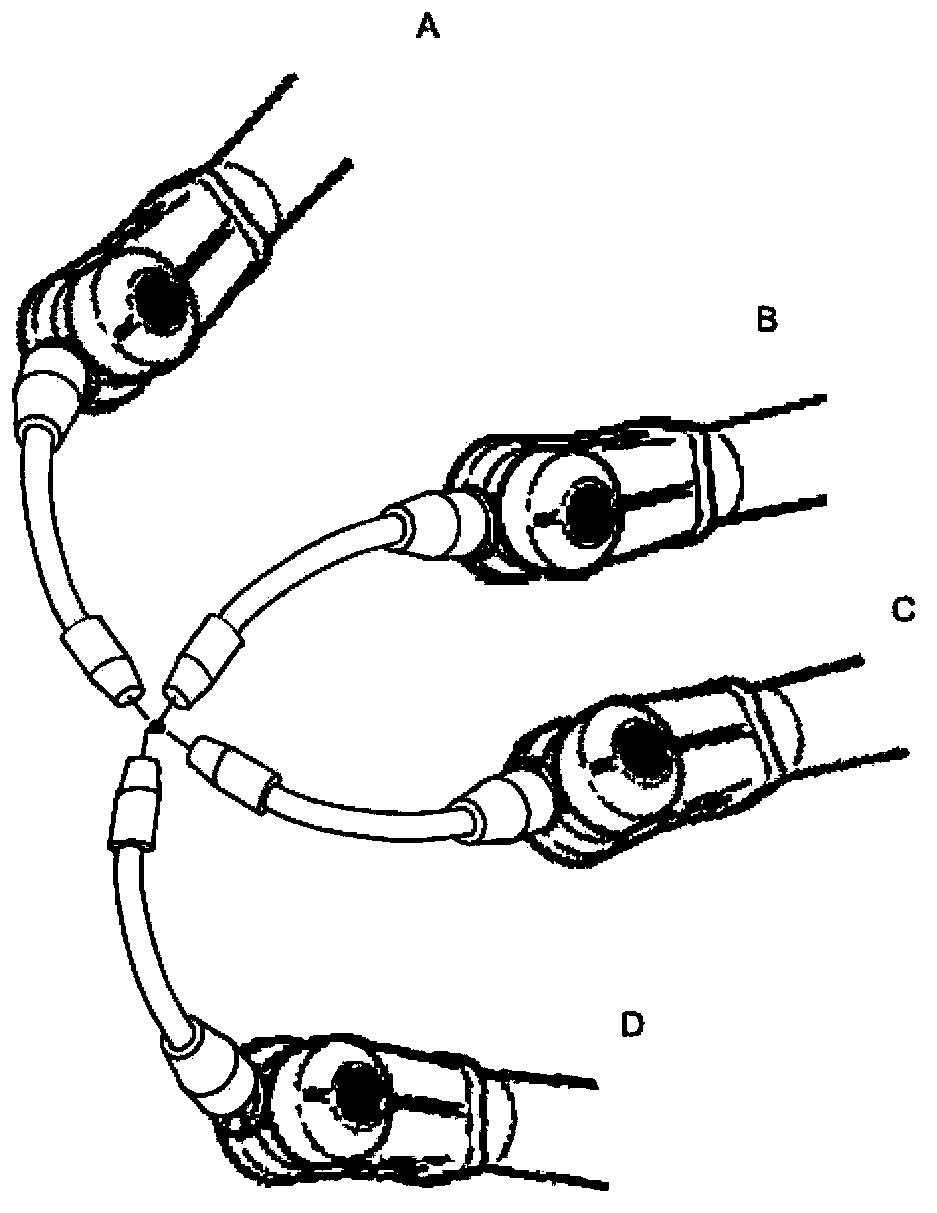
[0451] Such as Figure 8 As shown, the system has 4 robots: R1, R2, R3, R4. R1 has a cooperative relationship with R2 and R3. R4 has a cooperative relationship with R2, and has no cooperative relationship with R3, and R4 operates on the workpiece coordinate system on R3. R1 corresponds to the workpiece coordinate system R w1 , R2 corresponds to the workpiece coordinate system R w1 , R w2 , R3, R4 have no corresponding workpiece coordinate system.
[0452] The system consists of the following elements: e 1 = rob 1 , e 2 = rob 2 , e 3 = rob 3 , e 4 = rob 4 , e 5 = wobj 1 (R w1 for rob 1 ), e 6 = wobj 2 (R w1 for rob 2 ), e 7 = wobj 3 (R w2 for rob 2 ), e 8 = wobj 4 (wobj 4 ∈ rob 3 for rob 4 ), and e before relocation 1 = rob 1 , e 2 = rob 2 , e 3 = rob 3 , e 4 = rob 4 None of the base markings have been modified, so rob 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More