An information fusion positioning system and method based on RFID and vision
A positioning method and fusion positioning technology, applied in two-dimensional position/channel control and other directions, can solve the problems of inability to meet complex paths, low flexibility and accuracy, and large workload, and achieve accurate, fast and stable autonomous navigation, avoiding Loss of information, the effect of promoting efficient progress
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
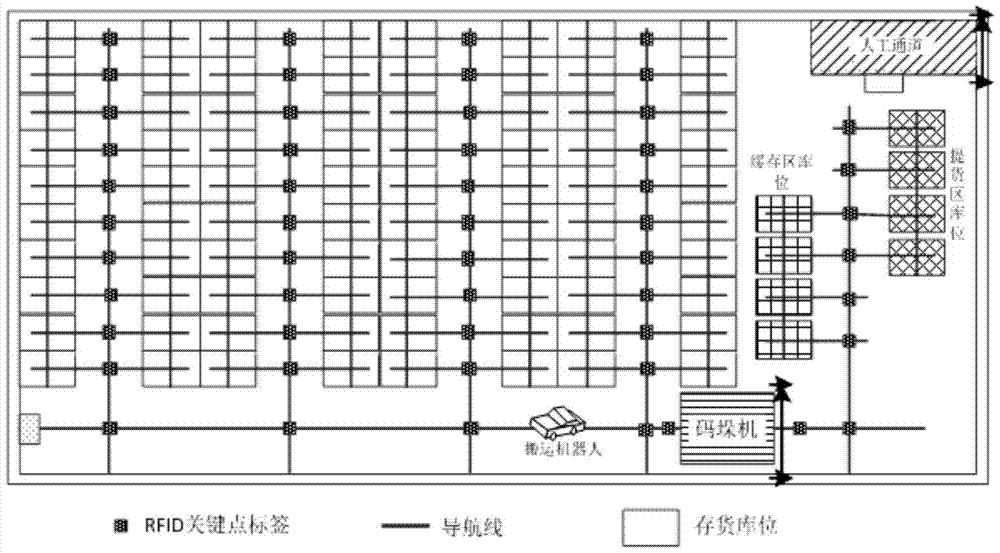
[0038] Such as figure 1 As shown, the actual test warehouse setting of this RFID and vision-based information fusion positioning system: lay a 20mm wide red path marking line on the ground of the test warehouse, and install an RFID tag every 2m on the path line. This system uses passive passive tags.
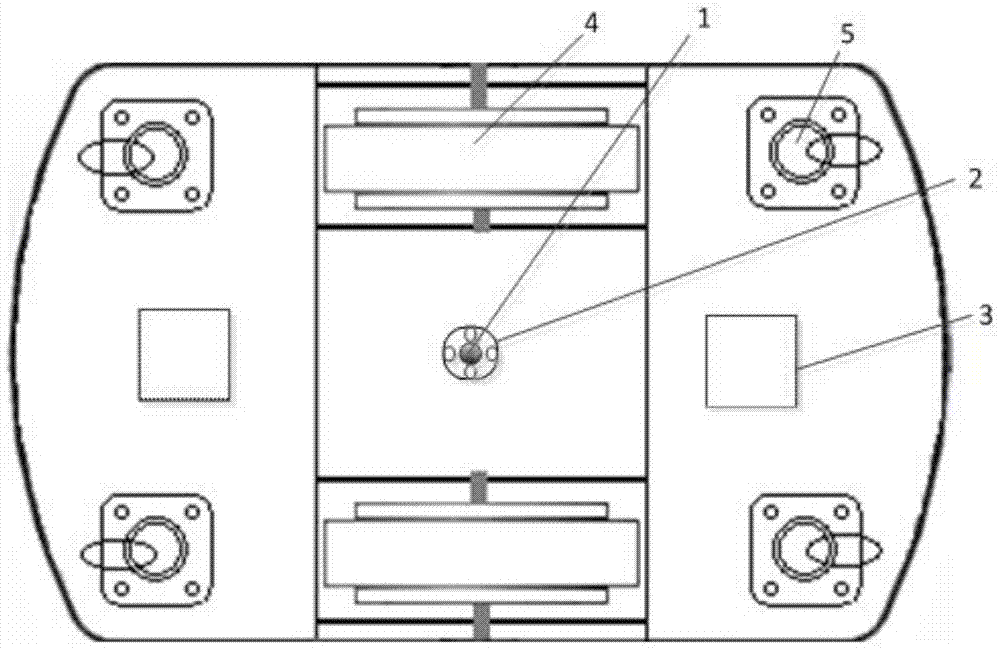
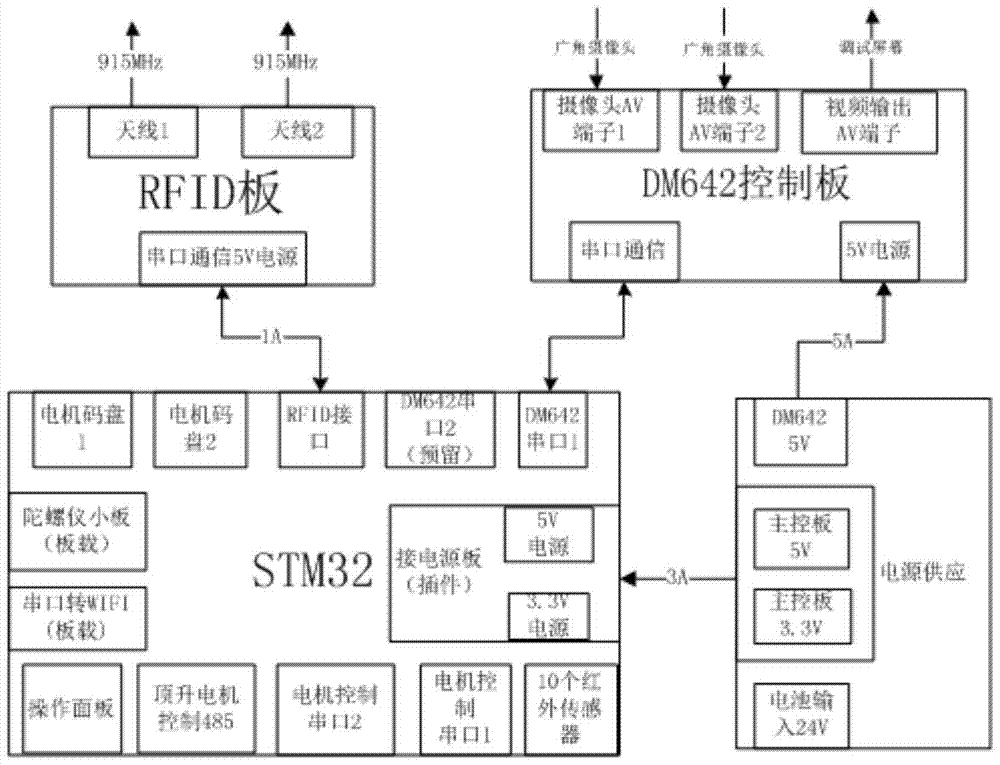
[0039] Such as figure 2 , image 3 As shown, the hardware structure of the RFID and vision-based information fusion positioning system includes: RFID positioning unit, CMOS image acquisition unit and information processing unit. The RFID positioning unit includes an RFID reader 2 and an RFID tag; the CMOS image acquisition unit includes a CMOS camera 1 and a lighting circuit 2; the information processing unit includes a DM642 processing chip, a serial communication interface and a DSP core processing chip.
[0040] In the inventive system, both the CM...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More